 Membres
Membres
Comme chaque année nous avons fabriqué un robot pour la Coupe de France de Robotique. En voici quelques images, accompagnées de descriptions qui vous permettront de comprendre nos choix et nos ambitions.
| Vue Globale | Ramassage des balles |
| Tri et stockage des balles | Electronique de commande |
| Positionnement du robot | Centrage sur un trou |
| Communication | Pour conclure ... |
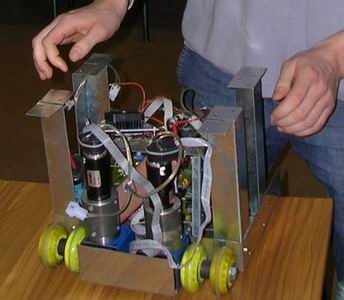
Vous pouvez voir sur ces photos à quoi ressemble notre robot actuellement. Certes, son apparence n'est pas très glorieuse, mais c'est uniquement parce que les différentes personnes qui interviennent aussi bien sur la mécanique que sur l'électronique ne cessent de le modifier pour effectuer des tests. (cliquez sur une photo pour l'agrandir)
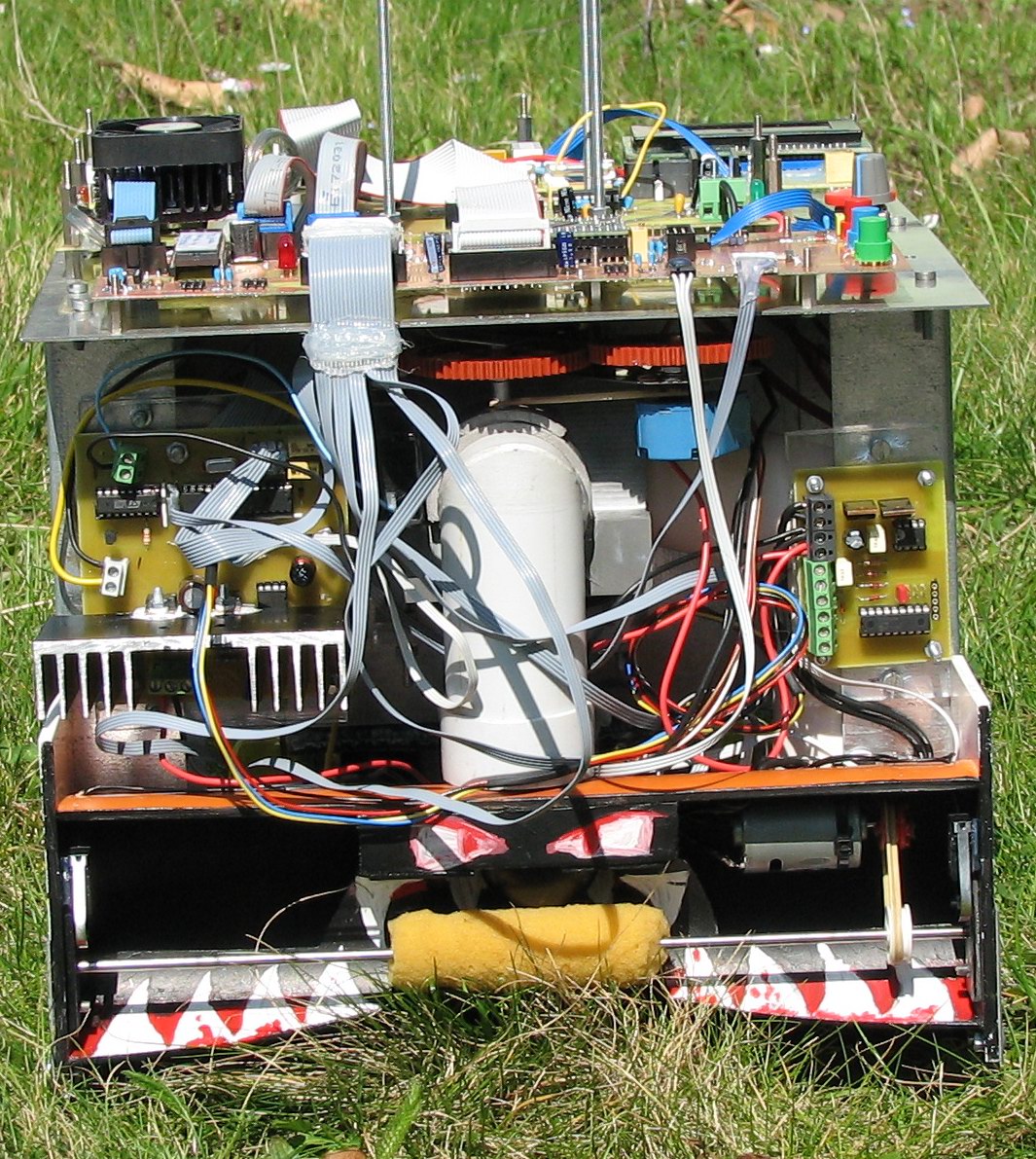
Pour ramasser les balles notre robot utilise une tige de mousse en rotation qui les entraîne dès le premier contact. Son efficacité est redoutable !
Le moteur qui entraîne la tige est alimenté par une alimentation à découpage, le circuit est visible en cliquant sur la photo du ramasse-balles.

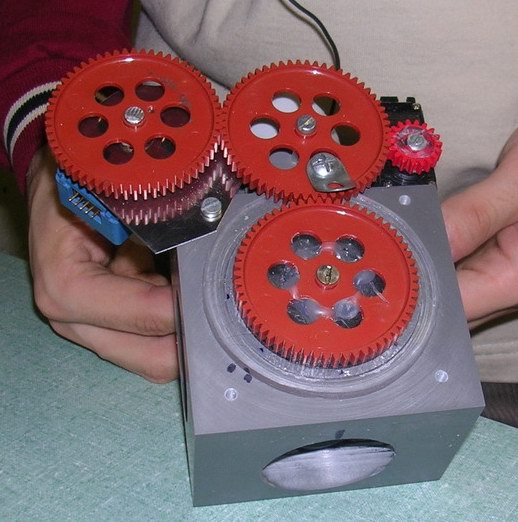
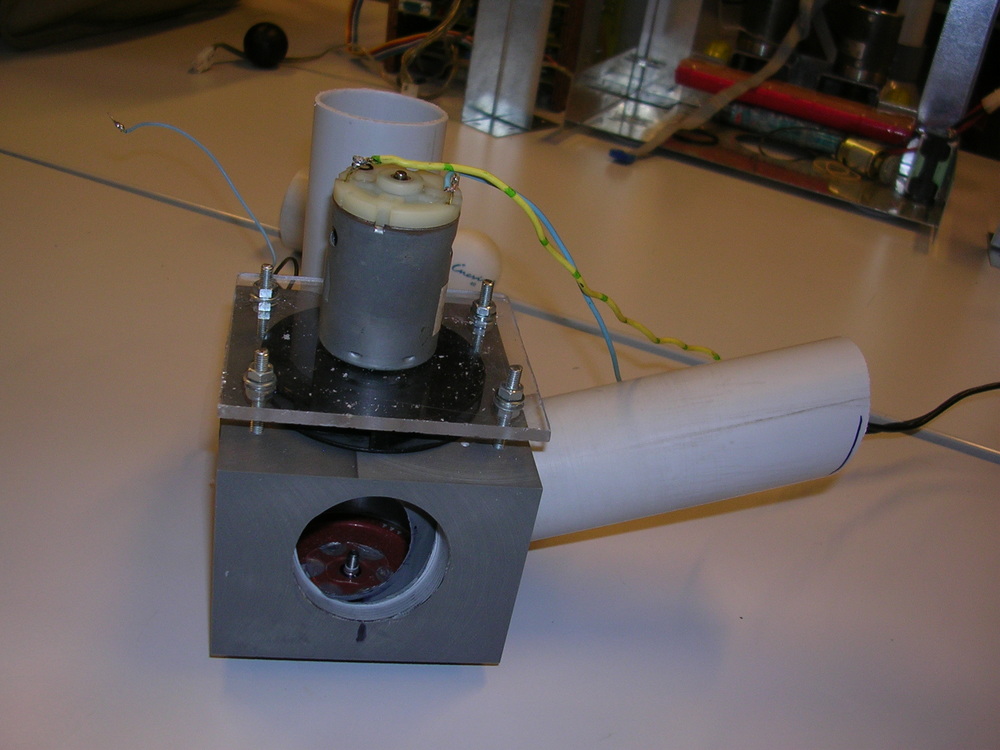
Une fois ramassées, les balles seront triées en fonction de leur couleur et dirigées vers des stockeurs grâce au systčme présenté ci-dessous. Nous utiliserons une cloche pour les placer dans les trous du terrain.
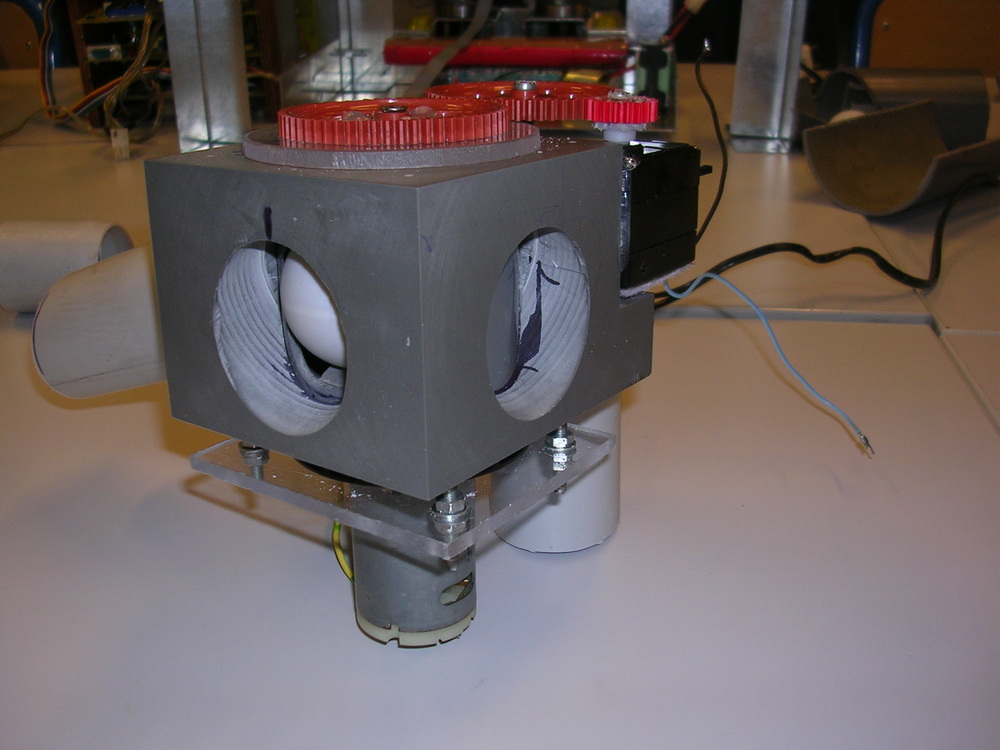
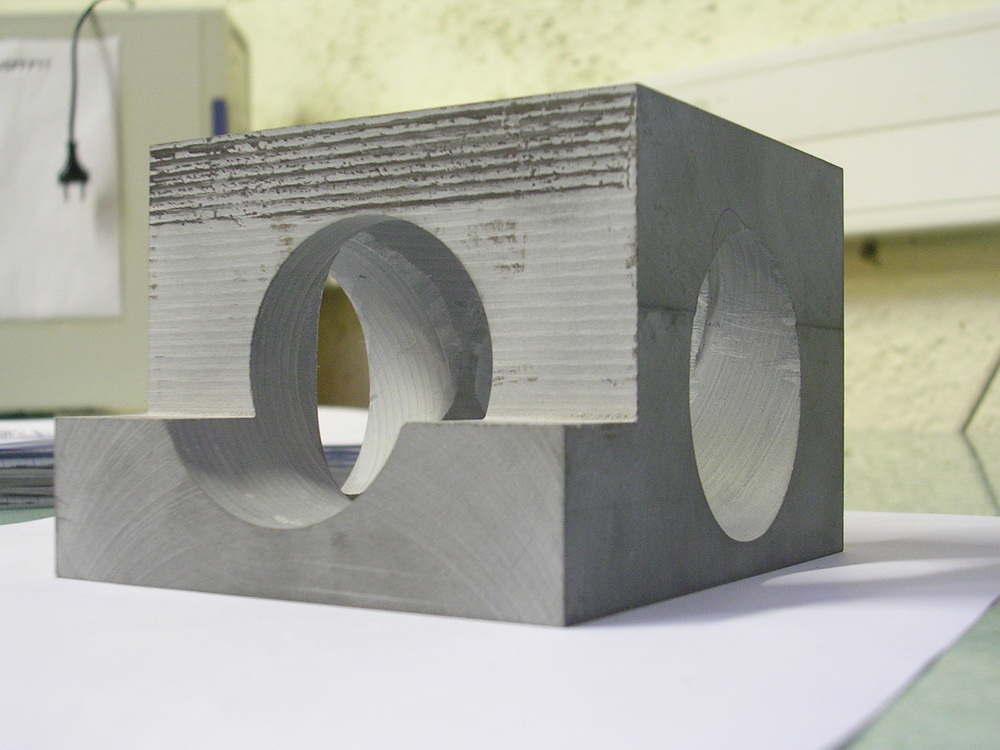
Un servomoteur modifié par nos soins permet la rotation du tube interne qui oriente la balle, via des roues dentées. Une turbine située sous le trieur génère l'aspiration nécessaire à tous les transferts de balles dans le robot. La pièce principale a été usinée grâce à un centre d'usinage "5 axes" dans une résine alliant résistance et légèreté.
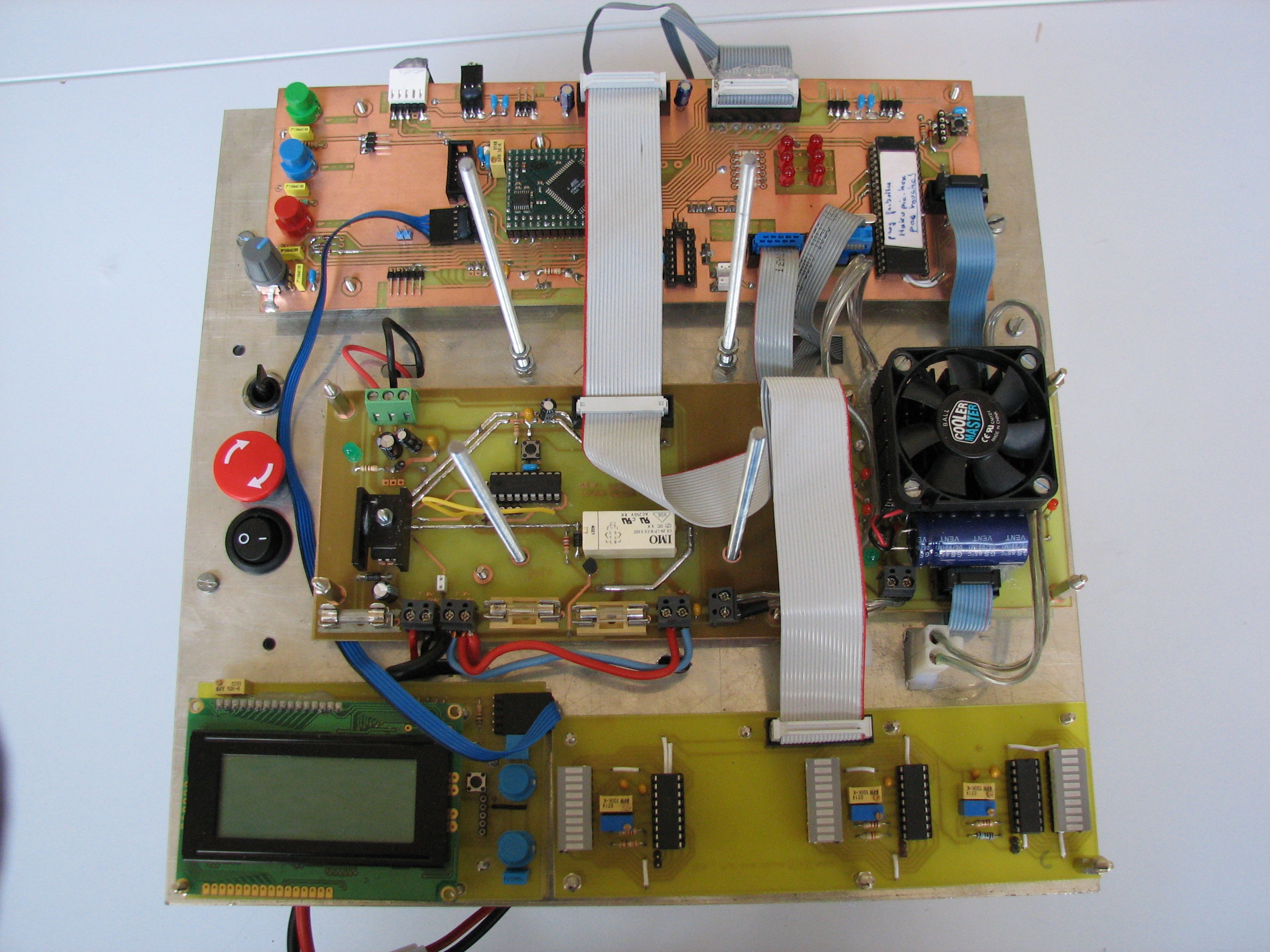
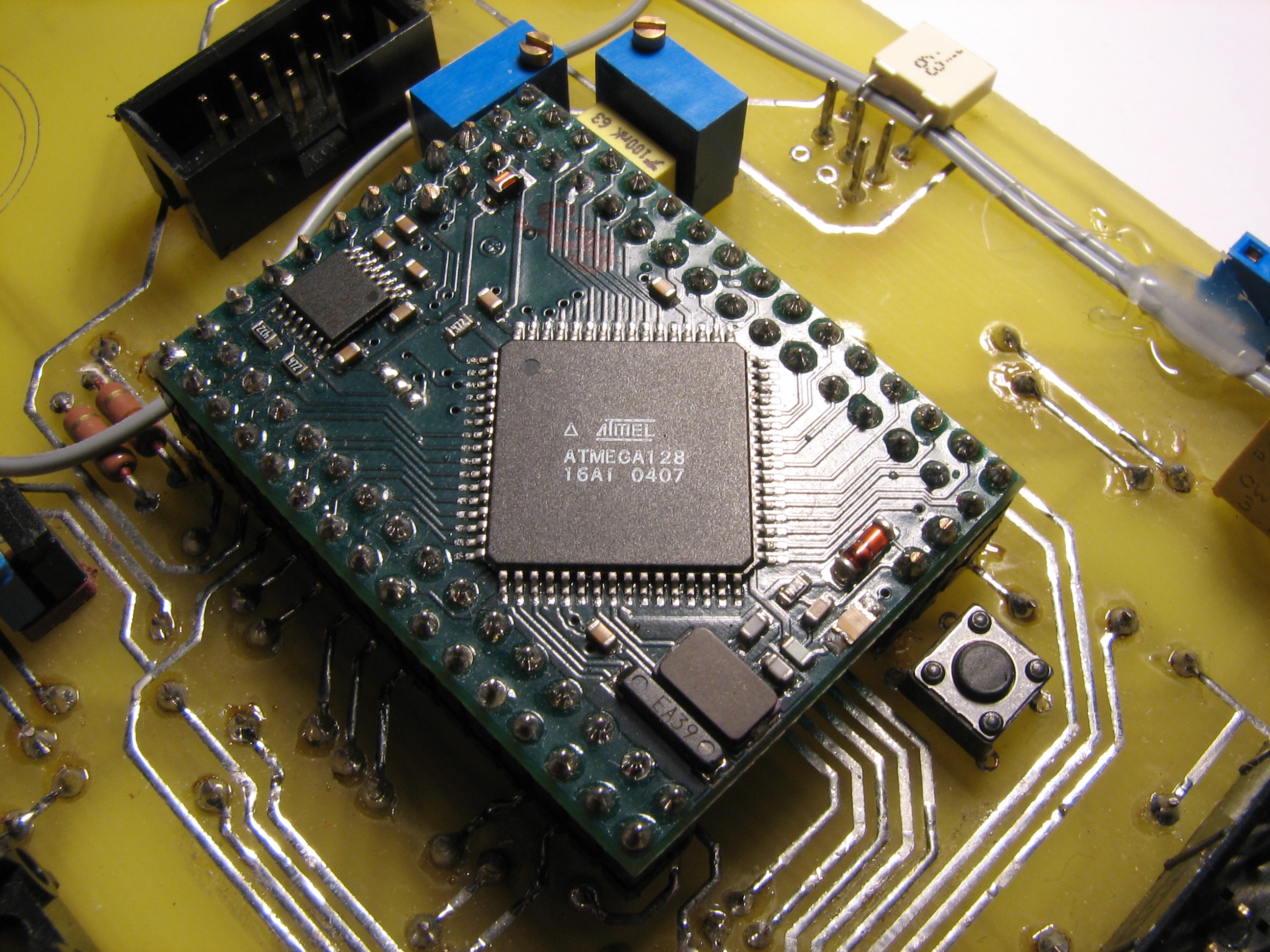
Durant le début de l'année, nous utilisions la carte principale du robot conçue pour la coupe 2005 en attendant d'en avoir réalisé une nouvelle, plus adaptée au règlement de cette année. Elle était architecturée autour d'un microcontrôleur ATMEL Atmega 128.
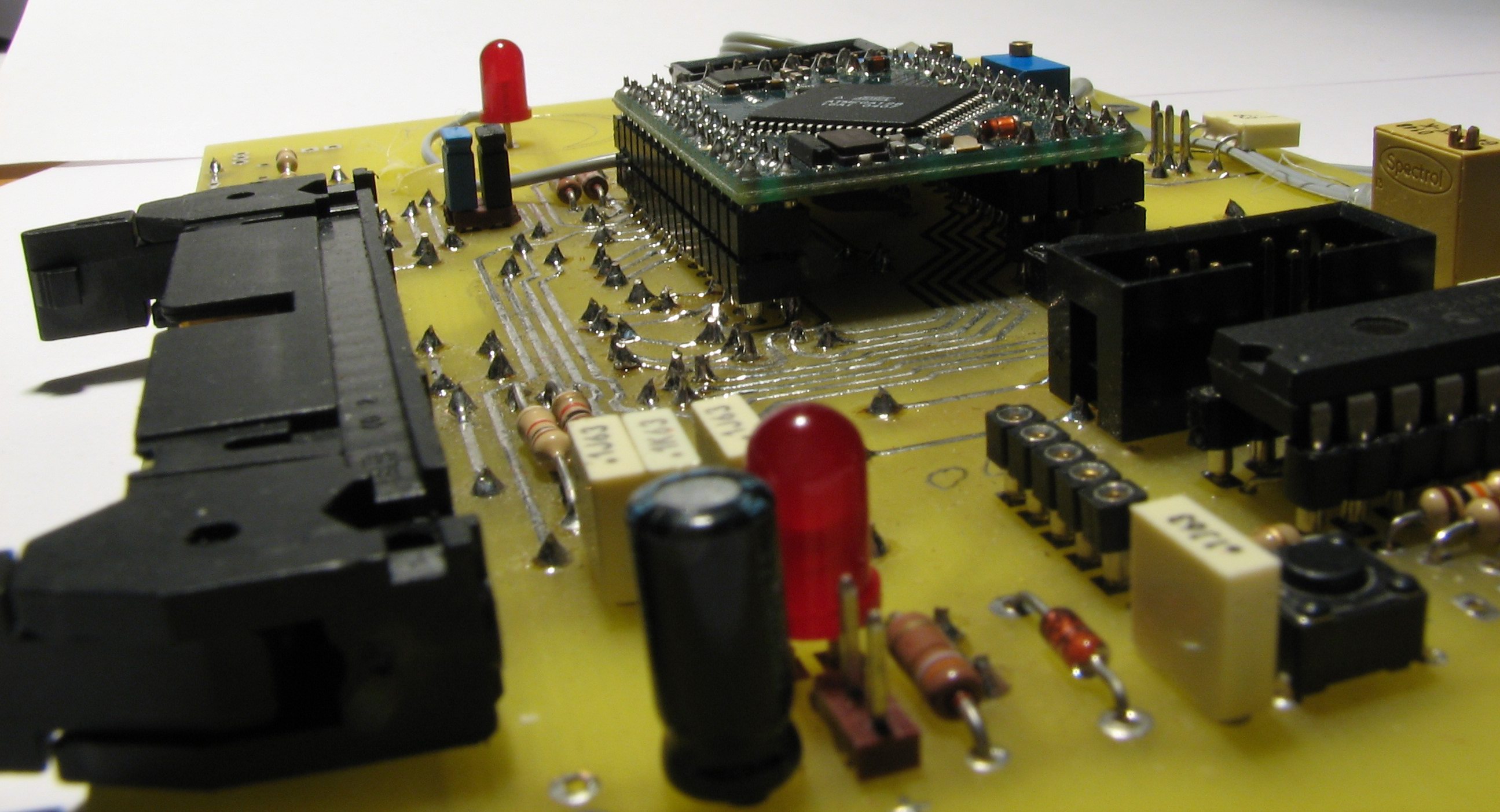
Voici une photo de la nouvelle carte principale.
Pour l'instant notre robot calcule sa position en temps réel en utilisant les informations délivrées par les codeurs incrémentaux des moteurs propulsant les roues. Cette méthode est assez fiable pour commencer, mais nous espérons mettre au point un repérage absolu par balises à ultrasons (et commandes HF).
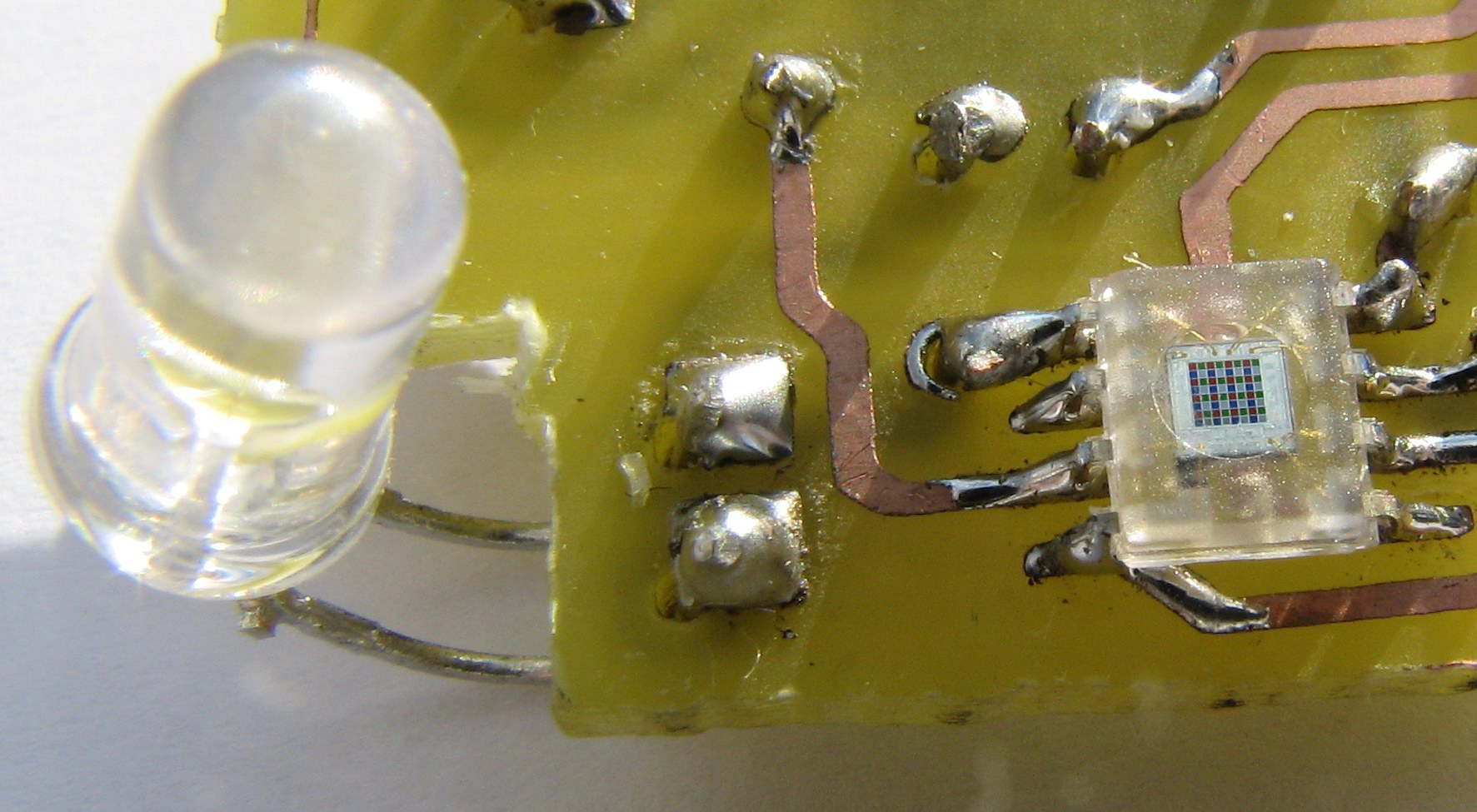
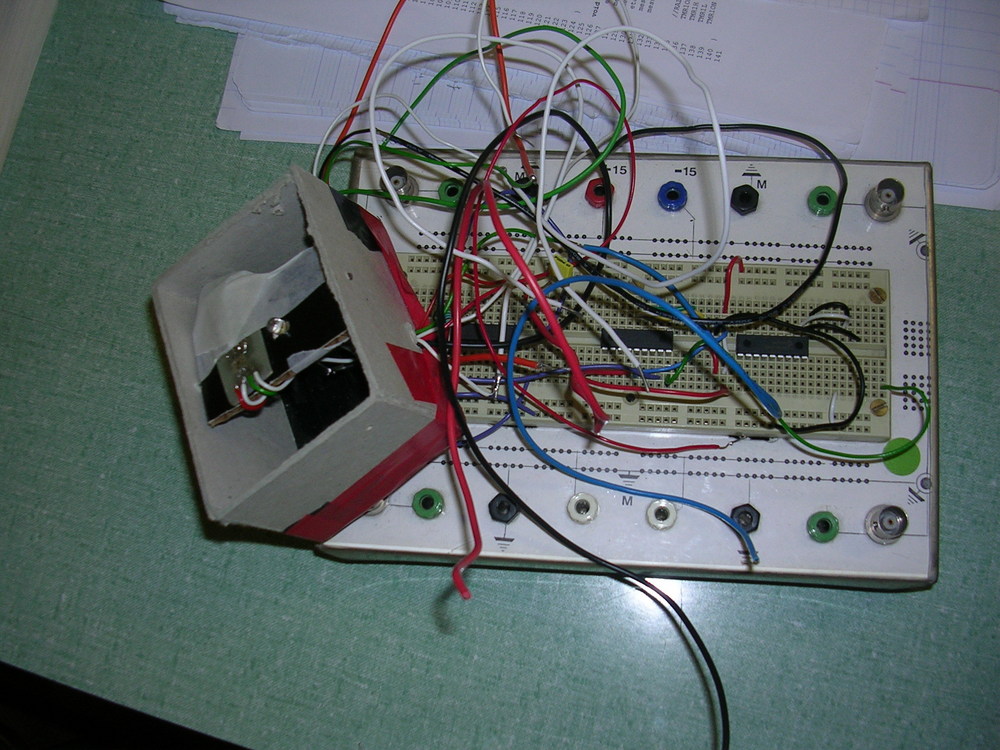
Pour détecter la couleur du terrain sous le robot afin de s'aligner correctement par rapport aux trous, nous utilisons des capteurs filtrés quadricolors, en format CMS. L'éclairage est assuré par des LED blanches. Nous avons fait nos premiers tests sur plaque d'essai, puis avec un montage dont les photos sont ci-dessous.

Pour communiquer des informations, le robot dispose de LED (diodes électro-luminescentes) et d'un écran LCD. Les LED représentent parfois directement des signaux (par exemple le sens de rotation des moteurs) mais peuvent aussi être commandées par des microcontrôleurs. L'écran, pouvant afficher quatre lignes de seize caractères permet de transmettre des informations plus complexes (nombres ou textes).
Le LCD fait partie d'un module indépendant. Il est interfacé avec un PIC 16F628, ce qui rend son utilisation très simple : les informations à afficher sont communiquées au module par une liaison série.

Nous espérons trčs bientôt pouvoir étoffer cette présentation de notre robot !
Encore merci à nos partenaires, sans qui rien de tout cela ne serait possible, n'hésitez pas ŕ visiter leur site !


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}