Ho Ho Ho des Robots pour Noël
Le froid s'installe sur Strasbourg et le Père Noël s'apprête à faire sa distribution de ... robots !
La fin du semestre approche à grand pas ainsi que les Deadlines de la conception de nos compétiteurs. Il est temps de voir où en sont nos équipes de choc. Résultat des courses, la conception et mise en plan des cartes électroniques est terminée, et la modélisation 3D de la mécanique se finalise : Nous sommes dans les temps !
Il est donc temps de vous présenter les nouveaux nés :
Le Gros robot
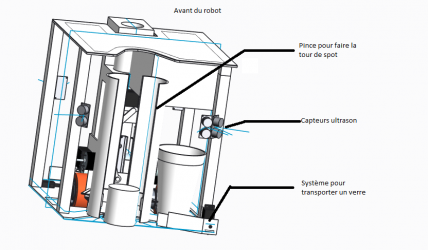
Notre robot principal a été conçu afin de réaliser les actions des pop-corn et des spots. La pince tubulaire nous permet d'empiler ces derniers. Les actionneurs permettant de récupérer les balles de ping-pong, de les stocker et de les recracher sont placés à l'intérieur à l'arrière du robot.
Le Petit robot
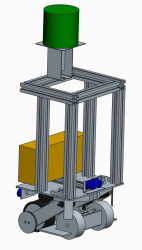
Cette petite tour aura pour mission de monter les escaliers. C'est ce qui lui vaut son bloc moteur style rover martien. Il pourra aussi taper les claps, l'action qui à notre sens est la plus simple à réaliser, et dérouler le tapis rouge.
Avec les deadlines de conception tenue, nous pourrons commencer à usiner et assembler notre robot début janvier. Objectif : Structure mécanique et cartes électroniques fonctionnelles pour mi février. Souhaitez nous bonne chance !
 Ajouter un commentaire
Ajouter un commentaireAucun commentaire n'a encore été posté. Soyez le premier à en laisser un !