 |
Kadidia Dramé |
ACCELEROMETRE+GPS POUR LE SUIVI D’OUVRAGES D’ART :
MISE EN PLACE DE FILTRES ADAPTATIFS POUR LE COUPLAGE
DES INFORMATIONS OBTENUES

Société d’accueil : Institut Géographique National
PFE présenté par : Kadidia Dramé
Directeur (directrice) du PFE : M.Thierry Person
Correcteurs : M.Jacques Ledig
M.Eddie Smigiel
La surveillance d’ouvrages constitue une part importante du travail des géomètres et topographes. Ceci résulte de la nécessité de contrôler les déplacements et/ou déformations d’ouvrages d’art au cours de leur construction puis lors de leur exploitation afin d’assurer leur pérennité et la sécurité. Ainsi, les Travaux Spéciaux, unité de l’Institut Géographique National, ont pour principal domaine d’activité le suivi sécuritaire et le contrôle géométrique d’ouvrages. C’est dans ce contexte que cette unité a initié, depuis quelques années, la création d’un système hybride GPS/Accéléromètre afin d’améliorer le suivi d’ouvrages. Le but final étant la création d’un système permettant la mesure millimétrique de déplacements.
C’est dans ce contexte que s’inscrit mon projet. Il fait d’ailleurs suite à une étude menée en 2005 par Marie-Estelle Duret. L’objectif principal est de créer un filtre adaptatif pour permettre le couplage effectif des données GPS et accélérométriques.
1. Présentation des instruments
L’accéléromètre
Un accéléromètre est un appareil servant à mesurer des accélérations. Il en existe différents types : les accéléromètres optiques, piézoélectriques, à jauge de contrainte, ou encore capacitifs. Ces accéléromètres fonctionnent tous selon le même principe : ils intègrent une masse liée au bâti du capteur par une lame flexible ou un ressort ; l’accélération se déduit alors de la force appliquée àla masse. C’est dans le principe de mesure de cette force que diffèrent les accéléromètres.
L’accéléromètre utilisé aux Travaux Spéciaux est un accéléromètre capacitif triaxial PCB Piezotronics. Son principe de fonctionnement est le suivant : le bâti et la masse dite sismique formen t un condensateur plan ; le capteur étant alimenté en électricité, il est possible de mesurer une capacité, qui est proportionnelle au déplacement de la masse et donc à l’accélération. Cet accéléromètre permet de mesurer des accélérations ’amplitude ±3g selon 3 axes (Même si l’unité de l’accélération est le m/s², il est usuel d’exprimer les accélérations en multiples de g, où g=9.8m/s²).
Les accéléromètres permettent, grâce à leur grande fréquence d’acquisition (0.3Hz à 40kHZ), de déterminer avec précision les vibrations d’une structure. Les accéléromètres ont aussi pour avantage d’être peu encombrant et de fournir un sig nal ininterrompu. En outre, les accélérations qu’ils fournissent peuvent être intégrées pour déterminer des vitesses et des positions. Malgré tout ce capteur a pour inconvénient principal d’être bruité et de dériver dans le temps.
Le GPS - Global Positioning System
Le GPS est devenu un outil de mesures classique en topographie. Il s’agit d’un système de localisation et navigation par satellites. Il fournit à un utilisateur, fixe ou en mouvement, partout dans le monde, une position absolue dans un système de référence mondial (WGS84), une vitesse et une information de temps. Ce positionnement s’effectue de plusieurs manières : il peut être absolu (utilisation d’un seul récepteur) ou différentiel (deux récepteurs sont alors utilisés), il peut être statique (le ou les récepteurs sont alors fixes) ou encore dynamique (le ou les récepteurs sont mobiles). Pour toutes ces configurations, la solution peut être ob tenue en temps réel ou en temps différé.
Pour notre cas d’étude, nous utilisons le mode cinématique différé avec une initialisation statique. Les récepteurs utilisés seront de type bifréquences et les antennes de types Choke Ring.
Le GPS permet aisément de surveiller un point isolé d’un ouvrage sans souci d’intervisibilité
avec d’éventuelles autres stations. De plus, il s’agit d’un système simple d’utilisation. Néanmoins, il possède également des inconvénients. L’utilisateurest dépendant du nombre de satellites visibles au moment de l’observation et de leur géométrie. Le signal GPS peut être interrompu par la présence de masques et peut être affecté par le multi-trajet. L es actuelles fréquences d’acquisition GPS, bien que de plus en plus élevées (actuellement limitée à 10HZ), ne permettent pas de déterminer la dynamique des ouvrages.
2. Etude des instruments
Le filtre de Kalman est le filtre adaptatif que nous allons utiliser. Il s’agit d’un estimateur procédant à l’extraction de l’information utile d’un signal bruité. Pour cela, il s’appuie sur deux équations : la première modélise, de manière dynamique, le fonctionnement du système alors que la seconde prend en compte les mesures du système. La phase de modélisation nécessite le maximum d’informations concernant le GPS et l’accéléromètre, notamment sur les bruits les affectant. L’étude de mon prédécesseur a mis en exergue deux points : d’une part la détermination de loi de comportement suivant la température du bruit faisant dériver les positions, une fois les accélérations intégrées et d’autre part la nécessité de maîtriser, au mieux, le traitement GPS.
Il donc nécessaire d’étudier, de près, chacun des instruments.
L’accéléromètre
L’accéléromètre est un appareil permettant l’obtention des accélérations avec une grande précision et à une fréquence d’échantillonnage élevée. Il est très pratique car peu encombrant. De plus, le signal accélérométrique est ininterrompu.Afin de mieux caractériser le signal en sortie de ce capteur, un calibrage a été effectué. A l’issue duquel les erreurs du capteur ont été modélisées. L’accélération peut alors mise sous la forme suivante :
Cela signifie que l’accélération mesurée à la sortie d’un accéléromètre correspond à l’accélération en entrée du capteur à laquelle il faut ajouter un terme dû au biais et un terme qui se rait la conséquence du bruit.
![]()
L’intégration puis la double intégration de cette formule précédente nous permet d’écrire :
![]() où v représente la vitesse
où v représente la vitesse
sortie entrée 0
![]() et p la position
et p la position
Le biais joue un rôle important en causant une dérive dans la vitesse puis dans la position.
L’erreur augmente quadratiquement dans le temps. Un biais de l’ordre d’un 1mg non corrigé sur l’accélération, pendant un trajet d’une heure, induit une erreur de 64 km sur le positionnement, en supposant la vitesse initiale nulle.
Le GPS
Le GPS bien que performant est affecté par de nombreuses erreurs. Ces erreurs sont connues mais sont difficiles à éliminer car peu modélisables comme l’erreur troposphérique. Pourtant, la prise en compte de ces erreurs joue un rôle important dans la détermination finale des positions calculées. D’ailleurs, les logiciels de traitement GPS diffèrent les uns des autres par leur paramétrage et leur aptitude à appréhender au mieux ces erreurs.
Afin de pallier le plus grand nombre d’erreurs, nous avons donc opté pour le logiciel Bernese, logiciel scientifique développé par l’université de Berne (Suisse), pour effectuer les calculs en mode statique sur de longues lignes de base. Ce logiciel a principalement pour avantage de ne pas se comporter en « boîte noire », l’utilisateur a donc une plus grande maîtrise de son calcul. Contrairement aux logiciels commerciaux, Bernese offre la possibilité d’intégrer de nombreux paramètres dans les calculs, ce qui permet de modéliser certaines erreurs (horloge, orbite, atmosphère…) et d’en minimiser les effets. Par contre, lorsqu’il s’agira de la détermination d’un point mobile, en mode cinématique donc, sur de courtes lignes de base le calcul s’effectuera sur un logiciel commercial, du type Ski-Pro de Leica. L’emploi d’un logiciel constructeur pour le calcul de la trajectographie s’avère être un bon compromis entre le temps de traitement et la précision des résultats obtenus. En effet, pour le traitement de courtes lignes de base, les erreurs atmosphériques influant sur le signal GPS sont moindres. De plus, les principaux facteurs d’incertitudes sont la stabilité du pivot, les trajets multiples et les masques.
Conclusion
L’étude des instruments nous a permis de constater la complémentarité de leurs caractéristiques. L’accéléromètre est un système délivrant des informations précises à court terme. Le GPS peut permettre de recaler les données accélérométriques toutes les 0.1s afin de limiter la dérive et de corriger les vitesses et positions obtenues après intégration. Il devrait donc borner l’erreur à long terme de l’accéléromètre tandis que ce dernier fournit des accélérations et par post- traitement des positions entre deux acquisitions GPS. La combinaison simple des deux types de données a été testée et s’est révélé non exploitable.
L’élaboration d’un filtre adaptatif dans le but de coupler les types de données est donc pertinente.
3. Le filtre de Kalman
Le filtre de Kalman, du nom de son créateur Rudolph E. Kalman, mathématicien américain né en 1930, a été présenté en 1960. Il s’agit d’un estimateur récursif de processus aléatoires. Il permet l’estimation de variables d’état d’un système (position/vitesse, par exemple, pour des systèmes mécaniques ou encore tension/intensité, par exemple, pour des systèmes électriques…) en utilisant un modèle de comportement a priori du système et des mesures réelles. Son appellation « filtre » vient du fait qu’il permet, entre autre, d’estimer un signal bruité, en séparant le signal de son bruit. Ce filtre est utilisé en trajectographie pour estimer une trajectoire, en navigation pour localiser un engin, ou encore en balistique pour estimer des conditions initiales inconnues. Il est également employé lorsque l’on veut coupler des informations venant de sources différentes afin de retrouver, par exemple, une trajectoire. Dans notre cas, le filtre de Kalman va nous permettre de connaître le déplacement d’ouvrages d’art en intégrant des données GPS et des données accélérométriques.
Le filtre repose sur une boucle de correction-prédiction, celle-ci s’appuyant sur un système de deux équations : la première modélise de manière dynamique l’accéléromètre alors que la seconde permet d’intégrer les mesures. D’où l’intérêt de modéliser les erreurs de l’accéléromètre pour permettre de mettre en place la première équation et la nécessité d’améliorer le traitement GPS afin d’intégrer des mesures de bonne qualité dans la seconde équation.
La première étape du processus réalisé par le filtre de Kalman est l’étape de prédiction : elle s’appuie sur le modèle dynamique. Elle consiste à projeter en avant les évaluations des inconnues et leur matrice de covariance afin d’obtenir des valeurs a priori. La seconde étape est celle de correction : la valeur «prédite» est corrigée à l’a ide du gain de Kalman et de l’innovation qui correspond à l’écart entre la mesure et la valeur prédite. Celle-ci permet, en fait, d’incorporer des mesures lorsqu’elles sont disponibles dans l’estimation a priori pour obtenir une estimation a posteriori.
Afin d’appliquer cette théorie à notre cas, plusieurs étapes ont été suivies :
Tout d’abord, nous avons déterminé les variables d’état que nous voulions estimer. Il s’agit donc de la vitesse, de la position et du bruit accélérométrique.
Ensuite, il s’agissait de modéliser le bruit responsable de la dérive de l’accéléromètre, le« biais ».
Puis, un algorithme dit « de mécanisation » permet tant l’obtention de la vitesse et de la position après correction du biais accélérométrique a également été établi.
Enfin, nous avons déterminé les équations du filtre.
Afin d’y parvenir, nous avons modélisé le systèmeaccélérométrique de manière mécanique. Il s’agissait d’établir l’équation différentielle liant l’accélération, la vitesse et la position d’un point. Pour cela, nous avons appliqué le principe fondamental de la dynamique et effectué de nombreux changements de repères. A l’issue de cette phase, l’équation du processus a donc pu être déterminée. De plus, s’agissant d’un filtre adaptatif, il a fallu intégrer les données du système d’aide que constitue le GPS. Ainsi, l’équation de mesure du filtre a été déterminée.
A l’issue de ces étapes, les positions calculées au préalable à l’aide d’un logiciel de calcul GPS pourront être directement injectées dans le fil tre ainsi que les positions et vitesses accélérométriques calculées à l’aide d’un algorithme de mécanisation. L’observation fournie au filtre correspondra à la différence entre les deux solutions.
La correction de l’accéléromètre sera effectuée àl’aide de la boucle de retour. Ainsi, cette disposition nous permettra de modéliser les erreurs de l’accéléromètre et d’intégrer, au sens mathématique, les accélérations de manière dynamique, afin d’en diminuer la dérive.
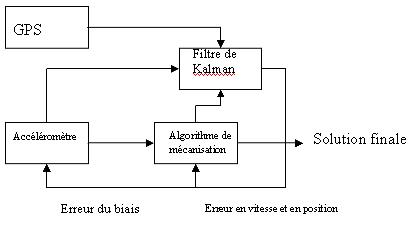
Configuration finale du Filtre de Kalman adoptée
4. Conclusion
A l’issue de ce projet, nous avons donc mis en place les équations d’un filtre de Kalman et permis l’amélioration de la maîtrise des calculs GPS. Une étape importante a donc été franchie quant à l’élaboration d’un système hybride pour le suivid’ouvrages d’art.
La prochaine étape du projet serait donc de programmer entièrement le filtre. Matlab paraît être l’outil le plus approprié. Ensuite, il faudrait définir une procédure pour parvenir à la synchronisation des données accélérométriques et GPS. Une phase de correction du filtre créé devra alors être envisagée car il est évident que des modifications seront à apporter au fur et à mesure des tests effectués.