 |
Lazare GRENIER |
ÉTUDES COMPLEMENTAIRES LIEES A LA MISE AU POINT DU
PHOTO-THEODOLITE DE L’IGN

Société d’accueil : Institut Géographique National
PFE présenté par : Lazare GRENIER
Directeur (directrice) du PFE : Thierry PERSON
Correcteurs : M. LEDIG et M. GRUSSENMEYER
Introduction :
Depuis une vingtaine d’années, l’IGN s’attache au développement de nouvelles techniques d’observation et de représentation du monde réel, au sein de différents laboratoires de recherche. Le projet du photo-théodolite suscite l’intérêt de l’unité Travaux Spéciaux au sein de laquelle s’est déroulé mon Projet de Fin d’Études, car elle a pour objectif d’apporter une alternative aux méthodes traditionnelles de surveillance des ouvrages d’art. La mise au point d’un tel appareil nécessite d’une part de se pencher sur les questions relatives à sa calibration, puis, dans un second temps, de réfléchir sur le traitement des images acquises sur le terrain. Ces deux préoccupations ont constitué les axes principaux autour duquel s’est articulé mon projet, même si le traitement des images a été privilégié dans la mesure où la calibration avait déjà fait l’objet de nombreux travaux antérieurs.
1. Présentation de l’appareil.
Le photo-théodolite associe un tachéomètre électronique à une petite caméra numérique, placée dans le compartiment initialement prévu pour accueillir la batterie du tachéomètre.
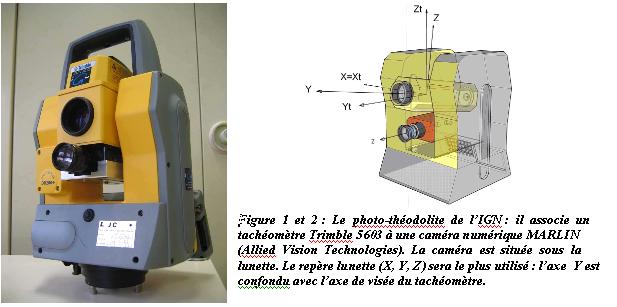
• Principe d’une mesure à l’aide du photo-théodolite.
Le tachéomètre sert à positionner et à orienter la caméra dans l’espace. De cette façon, il devient envisageable de réaliser des prises de vues à intervalles de temps successifs, en observant une même scène sous le même angle. Ainsi, on pourra réaliser des études de corrélation entre les photos relatives à chaque campagne de mesure, et en déduire les déformations de l’ouvrage étudié.
La détection de mouvements à l’aide d’une seule caméra peut susciter des interrogations. En effet, il est impossible de mesurer des déplacements en trois dimensions à l’aide de photos sans faire appel à la stéréorestitution. Il faut donc noter que les déplacements que nous serons en mesure de détecter avec notre appareil se situent dans un plan orthogonal à l’axe de prises de vues. Toutefois, l’utilisation de la stéréoscopie est envisagée à plus long terme par l’IGN.
La mesure des déformations par corrélation fera intervenir des algorithmes développés au laboratoire MATIS (Méthodes d’Analyses pour le Traitement d’Images et la Stéréorestitution). Nous reviendrons sur ce point plus loin.
2. La calibration du photo-théodolite.
La calibration du photo-théodolite, déjà abordée au sein de projets antérieurs, nécessite le calcul d’un certain nombre de paramètres. Lors d’une calibration standard, ceux-ci sont la distance focale, la position des points principaux de symétrie et d’autocollimation (PPA et PPS), et les paramètres de distorsion radiales et tangentielles.
Dans le cadre de notre projet, nous avons mis en place une nouvelle méthode de calibration, qui ne réalise pas de modèle mathématique ni de calcul en bloc par moindre carrés, mais qui définit une grille de passage entre coordonnées image et direction des rayons lumineux.
Pour cela, nous disposons une diode lumineuse à bonne distance de l’appareil, puis nous mesurons sa position à l’aide du tachéomètre, dans le repère lunette. La position de celle-ci définit alors le repère lunette de référence. Nous réalisons ensuite un grand nombre de prises de vues afin d’obtenir un jeu de photos sur lesquelles la diode couvre l’intégralité du capteur. Parallèlement, les angles d’orientation de la lunette du tachéomètre sont enregistrés. Ainsi, on peut déterminer les coordonnées lunette de la diode dans les différentes positions successives de l’appareil, et simuler la présence d’autant de diodes différentes que de mesures, situées sur une surface sphérique centrée sur l’origine du repère lunette. Cela permet de n’utiliser qu’une seule cible fixe. Nous obtenons finalement un jeu de couples de coordonnées, ce qui permet de définir les coordonnées du vecteur reliant le centre de prise de vues à la diode (cf. équation 1), à condition d’avoir au préalable mesuré la position de celui-ci. Afin de pouvoir attribuer une direction dans l’espace à tout point du capteur, il faut faire appel à une interpolation dans chaque dimension du repère lunette. La figure 3 présente la surface obtenue dans la direction Y.
La manipulation décrite ci-dessus est plus complète que celle nécessaire dans le cadre de notre projet. En effet, la géométrie du faisceau perspectif est inutile au cours des calculs de corrélation que nous avons effectués. Toutefois, ils pourront être repris dans le cadre d’une exploitation stéréoscopique des photos.
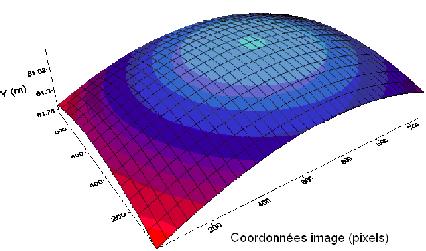
Figure 3 : Représentation de la valeur de la composante Y (repère lunette) en fonction des coordonnées image mesurées sur le capteur.
3. Exploitation des images issues des campagnes de mesures.
Après avoir réalisé un certain nombre de tests préliminaires, nous nous sommes rendus sur le site du viaduc de Millau afin de tester l’appareil, et de déterminer dans quelle mesure il était possible de détecter les mouvements du tablier à l’aide du photo-théodolite. Afin de disposer d’observations de référence, nous avons réalisé simultanément des observations à l’aide d’un autre tachéomètre, en mesurant les mouvements de prismes disposés sur l’ouvrage au cours de la journée.
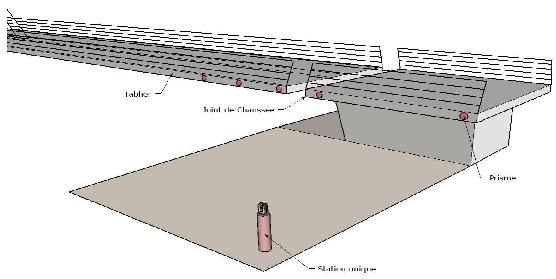
Figure 4 : Schéma de la manipulation effectuée sur le viaduc de Millau
Le traitement des données à notre retour nous a permis de tirer un certain nombre de conclusions immédiates :
Tout d’abord, il apparaît que les images ne sont pas exploitables directement à leur sortie du corrélateur. Une sélection des pixels pertinents sur les données relatives aux déplacements calculés par corrélation s’impose. De plus, les zones donnant les meilleurs résultats sont en général celles situées sur les contours des objets. Ainsi, nous avons pu programmer un algorithme de sélection des pixels pertinents dans les résultats en effectuant un seuillage basé d’une part sur les scores de corrélation (indices de similarité entre les pixels homologues) et d’autre part sur les résultats d’un filtre d’extraction des contours.
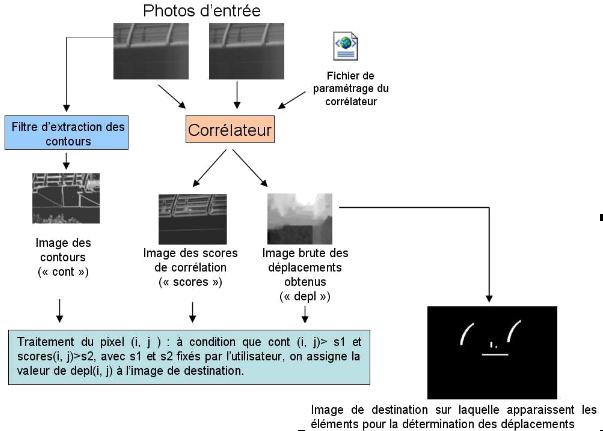
Figure 5: Schéma représentatif des étapes réalisées pour l’obtention d’une image résultante exploitable. L’image finale est une sous-image de « depl » ; les zones noires correspondent aux pixels éliminés, et les valeurs des pixels retenus correspondent aux déplacements mesurés pour le pixel correspondant sur la première photo d’entrée.
Conclusion :
Le projet de mise au point d’un photo-théodolite a donc suscité notre réflexion sur deux points principaux qui sont la calibration et le traitement des images acquises sur le terrain. Cette seconde partie constitue sans aucun doute l’axe de recherche principal qui sera mis en avant pour la suite du projet, afin d’apporter des solutions aux multiples problèmes rencontrés sur le terrain, comme notamment les différences de luminosités entre les différentes photos. Conjointement à l’exploitation stéréoscopique des images et à l’achèvement des travaux relatifs à la calibration de l’appareil, ces travaux pourront alors aboutir et donner naissance à une nouvelle approche méthodologique dans le domaine de la surveillance des ouvrages d’art par photo-théodolite.