MISE EN PRODUCTION DU LASER SCANNER GS100 AU SEIN DE
L ’UNITE TRAVAUX SPECIAUX A L ’IGN

Société d’accueil : IGN
PFE présenté par : Thomas Cosnard
Directeur (directrice) du PFE : Thierry Person
Correcteurs : Pierre Grussenmeyer et Tania Landes
Introduction :
Au cours de l’année 2003, l’Institut Géographique National (IGN) a acquis un laser scanner. Jusqu'à présent, l’appareil a été utilisé sur de nombreux c hantiers par diverses unités et laboratoires, principalement dans un contexte de recherche. Ces unités ont développé différentes techniques d’acquisition selon les objets qu’elles ont à lever, ainsi que différents outils de traitement des données issues de ces acquisitions.
L’unité Travaux Spéciaux (TS) a commencé à se servir de l’appareil pour réaliser des prestations à des fins commerciales. Pour le moment, un levé de mur de soutènement à Angers a été réalisé et d’autres prestations sont envisagées. Mon projet de fin d’étude a vu le jour en raison de la mise en œuvre effective du laser scanner aux TS.
Objectifs :
- Le premier est de réaliser un inventaire aussi exhaustif que possible des travaux réalisés à
l’IGN, afin d’évaluer les possibilités d’utilisation de l’appareil. Dans cette optique de recensement, il faut également s’intéresser aux autres applications potentielles. - Le second est de rédiger pour le personnel de l’unité des notices d’utilisation du matériel et des traitements associés. Le but est de permettre aux agents de l’unité de préparer une mission, d’utiliser le laser puis de traiter les données sans difficultés
- Le troisième est de mettre en place des procédures pour vérifier la qualité des résultats fournis par le laser scanner. La solution envisagée est la mise en place d’un polygone de contrôle.
1. Principes du laser scanner
Le laser scanner est un appareil de topographie récent, ses caractéristiques sont :
- L’acquisition de nuages de plusieurs milliers de points avec une fréquence élevée (jusqu’à 4000 points par seconde).
- La distance est mesurée à partir du « Temps de vol » de la pulsation du rayon laser.
- L’appareil enregistre aussi l’angle horizontal et l’angle vertical. ¾ La distance et les deux angles permettent d’avoir les coordonnées cartésiennes des points dans le repère interne au laser scanner.
- En plus de ces informations, l’intensité reçue par l’appareil est enregistrée. Cette donnée permet d’obtenir l’albédo de la surface, l’albédo étant le rapport entre l’énergie réfléchie sur l’énergie reçue par un objet.
- Enfin la plupart des lasers scanners enregistrent la couleur des points, cette information est enregistrée sous la forme : Rouge, Vert et Bleu
Les données fournies par un laser scanner sont donc constituées de sept éléments : X, Y, Z, I, R, V, B

2. Matériel
Au cours de mon projet, j’ai utilisé le laser scanner GS100 de MENSI, qui a les caractéristiques suivantes :
- gamme de distance : de 1 à 150 m, avec une précision de 3,2 mm à 50 m.
- gamme du débattement vertical : de -22° à 38°.
- gamme du débattement horizontal : sur 360°.
- une précision de 0,0018° sur les deux angles.
J’ai utilisé plusieurs outils complémentaires, fabriqués par l’IGN, pour mes travaux. Notamment :
- Des adaptateurs pour les sphères servant au
géoréférencement des stations lasers.
Les adaptateurs permettent de fixer les sphères sur des repères utilisés en topographie.
On peut ainsi permuter les prismes avec les sphères. L’écart entre la position des deux types de cibles est estimé au dixième de millimètre. - Une équerre permettant de réaliser une station avec l’axe vertical de
l’appareil sur le plan horizontal. Ce qui permet d’acquérir des points à la verticale de la station.

3. Travaux réalisés :
Lors de mon stage, j’ai eu l’occasion de participer àplusieurs travaux de levé par laser scanner :
- Levé d’un mur à Villeneuve-Lès-Avignon
- Levé d’un avion à Creil
- Levé d’une porte antique à Périgueux
Ces travaux m’ont permis d’améliorer ma connaissance du laser scanner. Ils ont aussi servi de base pour réaliser des procédures. De plus, j’ai pu tester les capacités de l’appareil et du logiciel d’acquisition ce qui m’a permis de recenser les limites de ces deux produits.
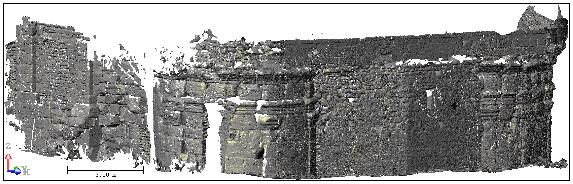
Modèles Numérique de terrain de la porte antique de Périgueux.
2. Les erreurs observées :
En premier lieu, il y a le bruit sur la mesure de la distance qui est important et variable selon les surfaces. Le bruit est de :
- 2 mm sur une surface blanche à 5 m
- 1 cm sur une surface noire à 5 m
Ensuite, il y a l’effet de bord. Il est dû à la configuration des objets et au diamètre du faisceau laser.
Le faisceau, bien que focalisé sur l’objet levé, conserve un certain diamètre. Or, lorsque le laser scanner lève un point sur le bord d’un objet, une partie du faisceau dépasse l’objet et va se réfléchir sur un autre objet situé en arrière. Le laser scanner reçoit alors deux signaux ; généralement seul le premier signal sert à calculer la distance. Mais quand la distance entre les deux objets est faible, l’appareil reçoit les signaux au même instant. La mesure du pic de signal est alors altérée et la distance calculée est alors entachée d’une erreur, nuisant à l’exactitude de position de certains points du nuage.
Enfin, il faut être conscient del’effet miroir . Habituellement les rayons sont réfléchis de manière diffuse. Le rayon est renvoyé dans toutes les directions, notamment celles du laser scanner. C’est ce qui permet d’obtenir la distance. Cependant certaines surfaces réfléchissent de façon spéculaire. Le rayon est renvoyé sur une seule direction comme pour des miroirs. Si le rayon se réfléchit de façon diffuse sur une nouvelle surface, une partie du rayonnement reprendra le chemin inverse. Le laser scanner enregistrera alors la distance totale, avec les angles pris au niveau de la première surface. Les conséquences sont :
- La création de points faux avec un dédoublement des objets
- La présence d’un trou dans le nuage au niveau de la réflexion spéculaire
3. Les traitements :
La chaîne des traitements peut être décomposé selon le graphique ci-contre.
- La préparation consiste à classer et nommer correctement chaque élément des données.
- Le Géoréférencement est le calcul du changement de repère entre le système du laser scanner et le système général.
- Le nettoyage est la suppression des points ne concernant pas l’objet levé. Cela permet d’éviter que ces points
n’interfèrent dans les traitements avals. - La concaténation est le regroupement de nuages de points, provenant de différentes stations.
- La segmentation est l’opération inverse. On découpe le nuage en sous ensembles. Cela permet de créer un nuage par objets différents.
- L’homogénéisation permet de réduire la densité des nuages de points dans les zones trop denses.
- Le Modèle Numérique de urface (MNS) est réalisé par une triangulation irrégulière de la surface, dont les sommets des triangles sont les points du nuage. Le MNS se calcule à partir de projections sur des surfaces : plans, cylindres, sphères…ou par croissance de maillage.

Séquence des traitements des données
- Les coupes sont réalisées à partir du MNS.
- Les orthophotos sont réalisées aussi à partir du MNS. On peut enregistrer sur le pixel une
information sur l’intensité reçue, la couleur, l’écart avec le plan de la photo. - La régression plane est le calcul d’un plan médian à partir de l’ensemble des points et des
écarts de planéité de chacun de ces points par rapport au plan calculé.
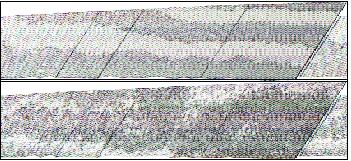
Régression plane d’un mur de soutènement à Angers
L’exemple du mur d’Angers montre ce que permet d’obtenir la régression plane :
- Le calcul de l’orientation de
l’ensemble du mur. Le plan du haut représente l’écart entre le
plan de régression et un plan vertical. Les écarts vont de 0 à 250mm. - Le calcul de la déformation du mur présent sur le plan du bas. Les écarts varient à ± 50 mm.
4. Mise en place de procédures
Pour que les opérateurs de l’unité TS puissent utiliser facilement le laser scanner et traiter les données, il fallait rédiger des procédures sur son utilisation et le traitement. Celles-ci doivent rentrer dans le cadre de la certification ISO 9001 qu’envisage actuellement l’unité.
La première procédure comprend :
- La préparation du matériel
- L’installation du matériel
- Les méthodes de levé
La seconde procédure comprend :
- La préparation des fichiers
- Le géoréférencement des stations
- Le nettoyage des nuages
5. Mise en place d’un contrôle
Afin de compléter la mise en production, il a fallu :
- vérifier le laser scanner
- vérifier le géoréférencement
- mettre en place le suivi du laser scanner
- tester l’équerre du laser scanner
Cette vérification a été rendue nécessaire par la mise en place de la certification de l’unité des Travaux Spéciaux. En effet la norme ISO 9001 impose ces vérifications.
La vérification a été réalisée avec un polygone créé spécialement pour le laser scanner. Le polygone a été levé par topométrie, puis une station effectuée au laser scanner a été relevée sur l’ensemble des points du polygone. Les résultats obtenus montrent qu’en position standard la station est déterminée avec une précision d’environ 2 mm, à partir de 10 points situés à moins de 40 mètres. L’écart sur ces points est de 5 mm en planimétrie et de 7 mm en altimétrie. Pour les points situés à plus de 40 m les écarts sont de 50 mm et 150 mm. La précision sur la station, lorsque celle-ci est placée sur l’équerre, est de 15mm.
Conclusion
La mise en production du laser scanner est bien avancée. Deux procédures ont
été réalisées : une pour l’utilisation du laser scanner GS100, afin d’effectuer
l’acquisition des mesures, l’autre pour leur traitement.
Enfin, pour valider les données que fournit le laser scanner, un polygone
d’étalonnage a été mis en place, permettant d’évaluer l’instrument et les
données issues de celui-ci.
Le projet a aussi permis de récapituler l’ensemble des erreurs associées au
laser scanner.
Le laser scanner est un nouvel outil qui complète la gamme des instruments de
mesures du géomètre. Il peut être assimilé à une hybridation
du tachéomètre dans sa technologie et de la photogrammétrie dans les résultats
qu’il fournit. Il préfigure ce que pourrait être, peut être, la topographie de
demain : une association intime de topométrie classique et de processus
photogrammétriques
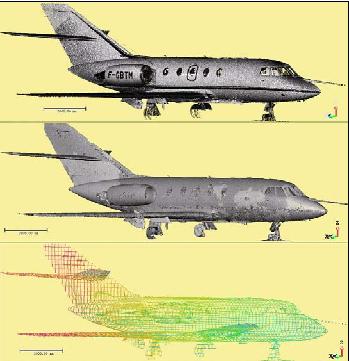
Traitements successifs réalisés sur l’avion : nuage géoréférencé, MNS et coupes