 |
|
ETUDE POUR LA REALISATION D’UNE CARTE DE VISIBILITE
SATELLITAIRE GNSS SUR LE CANTON DE GENEVE
Société d’accueil : GeoDataNetwork
PFE présenté par : Guillaume BIZOUARD
Directeur du PFE : Stéphane COUDERQ
Correcteurs : M. KOEHL et M. LEDIG
La technologie GNSS (Global Navigation Satellite System), GPS en tête, est actuellement en plein essor dans de nombreux domaines : topographie, géodésie, transport,… Toutefois, le positionnement par satellite est toujours limité par un facteur majeur qui est la présence de masques alentours, réduisant de façon significative la qualité des mesures dans certaines zones géographiques comme les zones urbaines denses, quand ils n’empêchent pa s tout simplement les observations. Pour contourner ce problème, il faudrait pouvoir établir des prévisions de visibilité satellitaire fiables, ce qui permettrait d’effectuer des mesures aux meilleures fenêtres de visibilité et ce dans des environnements fortement masqués. Les logiciels actuels réalisant de telles prévisions sont assez sommaires mais l’émergence récente du levé par laser aéroporté (ou levé LiDAR) permet d’entrevoir de nouvelles applications inédites. Les semis de points issus de levés LiDAR permettent effectivement de générer des Modèles Numériques de Surface (MNS)qui représentent le sol et le sursol (bâtiments, végétation,…) en 3D et qui modélisent ainsi les masques potentiels. Si on ajoute des logiciels comme ArcGIS d’ESRI qui réalisent de puissants traitements d’analyse spatiale, on peut dès lors envisager l’élaboration de nouvelles applications permettant de prévoir la visibilité des satellites de manièreplus fiable et plus commode. C’est l’objet de ce Projet de Fin d’Etudes (PFE) à savoir mener l’étude scientifique pour réaliser des cartes de visibilité satellitaire.
Elaboration d’un prototype
La création des cartes se fait par l’intermédiaire d’un prototype qu’il a fallu concevoir. L’élaboration s’est articulée en trois composantes qui vont être brièvement présentées.
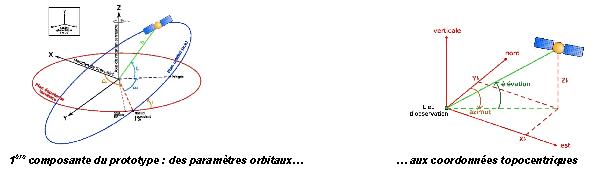
Mécanique céleste – Géodésie spatiale
Avant d’analyser si un satellite est visible ou non, il faut d’abord pouvoir déterminer sa position à une date quelconque. Pour ce faire, le point de départ est l’almanach des constellations qui donne les coordonnées képlériennes des satellites pour une date donnée. Le but de cette première partie du prototype est alors d’extrapoler ces paramètres orbitaux à la date de prévision souhaitée, puis de les convertir par le biais de divers changements de repère en des coordonnées exploitables pour une analyse de visibilité, c’est à dire des coordonnées topocentriques (azimut ; élévation) relatives à un lieu d’observation. Ces calculs sont effectués au sein d’un fichier Excel en grande partie automatisé.
Génération d’un Modèle Numérique de Surface
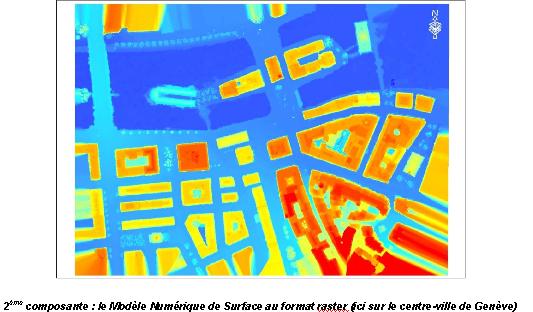
Une autre composante du prototype est la donnée maîtresse du projet : le MNS. Cependant, c’est le
semis de points LiDAR qui a été fourni pour le PFE afin de générer le MNS optimal pour une analyse de visibilité. En effectuant quelques traitements et aidé de travaux réalisés à l’Ecole Polytechnique Fédérale de Lausanne, un MNS raster qui semble modéliser le plus fidèlement l’espace bâti, a été créé sur chaque zone test de l’étude (centre-villede Genève et zone périurbaine).
Géotraitements sous ArcGIS
Enfin, la dernière composante traite de l’analyse de visibilité en elle-même. Elle a été élaborée sous le logiciel ArcGIS 9.1 doté de son extension Spatial Analyst. Le géotraitement de base de cette partie spécifique du prototype est l’outil d’ombrage (Hillshade) qui permet en temps normal d’ombrer une surface en fonction d’une source lumineuse mais qui sert dans le projet à déterminer si un satellite est visible ou non depuis chaque pixel du MNS. Un géotraitement a ainsi été créé via l’interface ModelBuilder en enchaînant plusieurs outils du logicielArcGIS pour pouvoir générer une carte de visibilité satellitaire à partir des résultats desdeux premières composantes.


Validation du prototype
Le prototype élaboré, il a fallu mettre à l’épreuve ses prévisions pour le valider. Le principe des tests a donc été de comparer les prévisions à des observations faites sur le terrain. Une première série de tests a permis dans un premier temps d’ajuster la procédure de tests mise en place et le MNS utilisé. Puis les deux suivantes ont permis de valider le prototype avec des résultats satisfaisants. Sur une soixantaine de prévisions :
- 74% étaient exactes,
- 12% incertaines,
- 14% fausses.
Ces tests ont également été l’occasion de mettre en évidence les lacunes du prototype dont la principale est due à la végétation. En effet, la grande majorité des prévisions fausses sont dues à des satellites dont le signal traverse le feuillage de certains arbres dans la réalité, alors que le prototype considère ces arbres comme des masques. Des solutions pour pallier ce problème sont alors envisageables…
Une analyse approfondie du prototype a apporté aussi un lot de réponses à certaines interrogations que suscitait ce projet et a montré que de telles prévisions, assez longues à réaliser individuellement, sont malgré tout relativement éphémères…
Vers une éventuelle application finale
Le prototype conçu n’est qu’une étape en vue d’un développement d’une possible application finale. La réflexion s’est ainsi portée sur le type de carte que cette application pourrait générer en plus de la carte de visibilité satellitaire fixe (car valable uniquement pour une date) réalisée avec le prototype. Il est donc envisageable de créer des cartes dynamiques de visibilité, valables sur un intervalle de temps complet. Elles prendraient la forme de fichiers vidéo ou d’animation.
On peut aussi imaginer générer des cartes de visibilité minimale ou maximale sur une plage horaire.
Elles renseigneraient sur la pire ou la meilleure visibilité que l’on puisse avoir sur un intervalle de temps. Des cartes des horaires auxquels surviennent ces visibilités minimales ou maximales pourraient être associées aux précédentes.
Des prototypes de ces genres de cartes ont réussi à être générés.
Enfin, une petite étude pour réaliser des cartes de DOP, information ultime en matière de positionnement par satellite, a été conduite.
Conclusion et perspectives
Ce PFE et les différents résultats obtenus montrent que le projet de réaliser des cartes de visibilité satellitaire est pertinent, possible et viable. Cependant, d’autres études seraient souhaitables pour perfectionner le prototype. Des perspectives pour une éventuelle application finale sont déjà imaginables. Tout d’abord, ce ne sont pas que les domaines de la topographie et de la géomatique qui pourraient être intéressés ; le milieu des transports (collectifs et ferroviaires) montrent aujourd’hui son intérêt pour de telles applications à travers d iverses études menées. Ensuite, la solution finale pourrait peut-être prendre la forme d’un service we b, mais les longs temps de traitements nécessaires pour effectuer les prévisions, couplés au caractère très provisoire de ces dernières, suggèrent plutôt un autre type d’application. Finalement, en attendant que les performances informatiques augmentent, une application de prévision de visibilité satellitaire telle qu’elle a été conçue dans ce PFE, serait effectivement plutôt destinée à d’importantes entreprises, bureaux d’étude ou institutions publiques. Elle y serait employée comme un outil d’aide à la décision pour de vastes projets où la couverture satellitaire est un enjeu sécuritaire important.
Ce projet a été réalisé en collaboration avec la Direction Cantonale de la Mensuration Officielle de Genève.