 |
Rémy BOUILLAGUET |
MESURE DE SURFACE DE LA MER PAR GPS CINEMATIQUE :
METHODOLOGIE ET PRECISION / EXACTITUDE

Société d’accueil : LAREG (IGN)
PFE présenté par : Rémy BOUILLAGUET
Directeur (directrice) du PFE : Marie-Noëlle BOUIN
Correcteurs : M. FERHAT
M. BONNEFOND
Introduction
L'archipel du Vanuatu dans le Sud-Ouest du Pacifique intéresse de nombreux scientifiques de
part ses caractéristiques géodynamiques: activité tectonique et volcanique, fortes variations spatiales de la bathymétrie, … Pour caractériser les déplacements verticaux du fond, l'équipe du LAREG et de l'IPGP (Institut de Physique de Globe de Paris) suit l'évolution du niveau des mers autour de l'île de Santo située dans l'archipel. Dans cette optique, il a été décidé d'effectuer des mesures avec la technique GPS bien que la zone soit couverte par des données d'altimétrie. Après plusieurs campagnes de mesure, l'objectif est à présent de caractériser la précision des mesures GPS cinématiques en mer. On s'attend à des ordres de précision différents suivant la zone de levé, l'étatde la mer, la longueur de la ligne de base, … Il s'agi ra donc dans un deuxième temps de mettre en évidence les sources d'erreur et de caractériser leur influence sur la qualité des résultats.
1. Présentation d'une campagne de levé
L'équipe du projet a réalisé plusieurs campagnes de mesure GPS: une première en 2003 (résultats de qualité moyenne), une deuxième en 2004 et une troisième session au début de 2006. Les observations GPS se font à la fois sur un bateau et sur une bouée avec des objectifs différents: la bouée est placée au mouillage au-dessus des marégraphes pour des mesures locales tandis que le bateau navigue dans plusieurs zones (baie, près des côtes, plus au large, …). La figure 1 présente la géographie du lieu et l'itinéraire du bateau lors de la campagne 2004. Les cercles rouges illustrent la position des marégraphes et les verts, à terre, représentent les stations GPS de référence.
2. Correction des données GPS
Avant de caractériser la précision du système GPS en mer, il est indispensable de s'affranchir des différents paramètres propres au milieu maritime et perturbant la mesure. Cette correction des hauteurs mesurées par GPS est réalisable grâce aux nombreuses données que nous possédons sur la zone. Tout d'abord, il s'agit de s'affranchir des variations de marée à l'aide des données fournies par les marégraphes. Cette opération élimine en partie les variations à grande échelle, principalement diurnes et semi-diurnes, caractéristiques de l'évolution de la marée. De plus, les hauteurs déterminées par GPS cinématique sont entachées de la pente de la surface moyenne qui peut être relativement importante dans certaines zones (jusqu'à 10 cm pour une distance de 1 km). Pour réduire son influence, nous utilisons les données d'altimétrie (Topex/Poséidon) qui sont affectées de la pente du géoïde de la même manière que les données GPS. La différence entre les hauteurs GPS et T/P permet effectivement de diminuer l'impact de ce paramètre (figure 2).
Si on fait la différence entre les 2 hauteurs, on s’aperçoit que la série varie moins dans
le cas de la différence (graphe du bas) que pour les simples mesures GPS (haut).
On a donc en théorie supprimé l’influence de la pente du géoïde. Cela se vérifie
surtout au début et à la fin de la série.
Ecart-type sur l'ensemble de la série de Sabine:
- Données corrigées de la marée: s # 1,250 m - Résidus GPS - T/P: s # 0,461 m
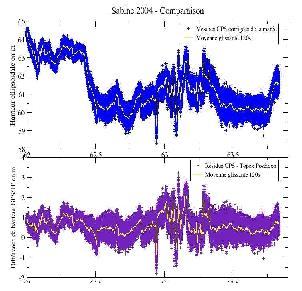
Figure 2: Comparaison avant et après corrections des hauteurs T/P. Cas de la zone de Sabine.
Les deux premières corrections servent essentiellement à limiter l'influence des variations à grande échelle; l'imprécision au niveau local ne diminuant pas. Ce constat s'appuie sur l'étude des séries temporelles de hauteurs avec la méthode de la moyenne glissante. Nous pouvons ainsi déterminer la précision sur de petits échantillons(120s dans notre cas) et comparer son évolution après chaque correction. Finalement, pour réduire l'imprécision locale, nous employons les données d'attitude provenant de la MRU (Motion Reference Unit) du bateau. Puisqu'elles mesurent les mouvements du navire, il nous est possible de connaître les variations de hauteur dues à l'état de la mer, et donc de s'en affranchir en les retranchant aux hauteurs mesurées par l'antenne GPS. La précision locale des mesures s'améliore effectivement après cette dernière correction.
Les différentes corrections ont été appliquées auxdonnées GPS de 2004 et de 2006 avec des conséquences équivalentes pour les deux campagnes de levé; La majeure partie de la dispersion des hauteurs GPS est le fait des mouvements de l'antenne dus aux variations de la mer.
3. Les différentes sources d'erreur et d'imprécision
Les erreurs GPS
Les principales sources d'erreur inhérentes au système GPS sont la longueur de la ligne de base et les coupures dans les données. Pour le premier paramètre, son influence sur la qualité des mesures devient trop forte à partir d'une distance de 50 km entre la référence et le mobile. Concernant les pertes de signal, un post-traitement approprié permet de limiter leur impact.
L'état de la mer
Les corrections sur les données GPS ont permis de mettre en évidence l'influence de ce paramètre illustrée par la figure 3.
On compare :
Les données uniquement corrigées de la marée. En bleu.
Et ces mêmes données auxquelles
on a retiré d’une part les hauteurs ellipsoïdales déterminées par le satellite T/P
(pour s’affranchir de la pente du géoïde) et d’autre part les variations de la mer
mesurées par la centrale d’attitude du bateau. En rouge.
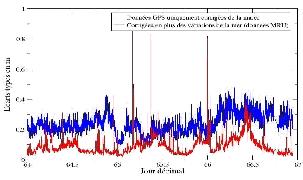
Figure 3: Comparaison des écarts-types "glissants"avant et après correction de la MRU à Wusi
Remarque: Les ordonnées sont les valeurs d'écart-type pour chaque intervalle de la moyenne glissante (120 s). Elles représentent donc la dispersion locale des mesures.
Vitesse/accélération du bateau
Plus que la vitesse, ce sont les accélérations (ou décélérations) importantes du bateau qui provoquent dans la plupart des cas une plus grande dispersion des mesures GPS: hauteurs plus irrégulières. Au contraire, une vitesse uniforme est synonyme d'une faible dispersion des résultats. Par ailleurs, la vitesse influence l'enfoncement du bateau et donc l'exactitude des mesures de hauteur.
Le post-traitement
La qualité du post-traitement cinématique est primordiale pour une bonne précision des résultats. Nous avons ainsi optimisé le calcul de deux logiciels de traitement (Track et GrafNav) à l'aide de tests. Les traitements ont été réalisés à partir des données de 2004 et 2006. Après la comparaison entre les résultats issus de ces deux logiciels, il s'avère que GrafNav est le plus adapté à notre étude: pertes de signal mieux gérées, hauteurs ellipsoïdales moins dispersées, plus grande capacité de calcul et donc gain de temps, …
4. Précision du levé GPS cinématique en mer
L'étude approfondie des résultats des campagnes 2004 et 2006 m'a permis de dégager une précision relative à chaque type de zone géographique. Cette "classification" ne concerne cependant que ce levé autour de l'archipel du Vanuatu et on ne peut garantir qu'elle s'applique à tout levé GPS en mer.
Situation de levé |
Données GPS corrigées de la marée |
Données corrigées en + des variations de la mer |
Dans une baie |
Autour de 5 cm, parfois - |
< 5 cm |
Bateau au mouillage |
10 - 15 cm |
Autour de 5 cm |
Bateau loneant une côte |
15 < < 25 cm |
5 < < 15 cm |
Au large |
20 < < 30 cm |
5 < < 15 cm |
Les ordres de précision donnés dans le tableau ci-dessus correspondent aux mesures GPS du bateau. Pour la bouée, la précision des hauteurs n'est pas meilleure que celle des mesures sur bateau lorsqu'il se situe au mouillage. Les données d'attitude (MRU) ne concernant évidemment pas la bouée, l'apport de ces données est donc indéniable car elles permettent d'atteindre (pour le bateau) une précision équivalente à celle de mesures GPS supposées plus stables spatialement (bouée).
Conclusion
L'étude des caractéristiques géodynamiques de l'archipel du Vanuatu nécessite des précisions de mesure relativement élevées Les hauteurs brutes déterminées par GPS en mer ne permettant pas d'atteindre de tels niveaux de précision, nous avons mis en place une méthodologie de correction des résultats; la plus significative pour l'amélioration de la précision étant la correction de l'état de la mer. Après ces opérations, nous parvenons à des précision intéressantes: moins de 5 cm en zone calme et entre 5 et 15 cm plus au large. Les mesures altimétriques étant impossibles trop près des côtes, le levé GPS sur bateau apparaît donc comme une solution pour faire la liaison entre marégraphe et trace de satellite.
Il reste néanmoins à s'assurer que les résultats GPS de surface moyenne, en plus d'être relativement précis, sont exacts. Une des méthodes envisageables consiste à comparer les hauteurs GPS corrigées pour les deux campagnes de levé (2004 et 2006) avec un logiciel de création et de représentation de surfaces (GMT par exemple). En cas de bonne corrélation, une comparaison avec les hauteurs déterminées par altimétrie apporterait la confirmation de l'exactitude des résultats GPS.