 |
Romain Auger |
ETUDE DES BESOINS OPERATIONNELS DE G2B ET MISE EN
PLACE D ’ UNE CHAINE DE POST - TRAITEMENT DES DONNEES
ISSUES DE SYSTEMES LASER AEROPORTES

Société d’accueil : G2B
PFE présenté par : Romain Auger
Directeur (directrice) du PFE : Marc Daeffler
Correcteurs : Tania Landes, Pierre Grussenmeyer
1. Contexte
Ce Projet de Fin d’Etudes a été réalisé au sein de la société G2B (Nantes) ainsi que dans le service Photogrammétrie de FIT Conseil (Gennevilliers). G2B est une filiale du groupe FIT qui est spécialisée dans l’acquisition et le traitement des données laser aéroporté. Le traitement étant effectué, jusqu’alors, par Geokosmos (basé en Russie, actionnaire de G2B), un certain savoir-faire doit être développé en interne pour permettre de contrôler le traitement.
2. Objectifs
Evaluation des logiciels de traitement
Parmi le faible nombre de logiciels permettant de traiter les données issues de systèmes laser aéroportés, les logiciels d’Inpho (Scop++ et DTMaster) et de Terrasolid (TerraScan, TerraModeler et TerraPhoto) doivent faire l’objet d’une comparaison sur la base de la qualité du traitement et de l’adaptation aux besoins du client et aux données sources. Cette comparaison doit, par la suite, conduire au choix d’un de ces deux logiciels.
Mise en place d’une chaîne de traitement
L’étude doit conduire à la mise en place d’une méthodologie pour le traitement des données laser. Un guide doit être rédigé pour permettre aux opérateurs de choisir les paramètres de traitement adaptés au terrain levé.
Applications particulières du laser aéroporté
En plus des données habituellement produites lors du traitement des données laser, certaines applications peuvent nécessiter un traitement particulier. C’est le cas de la modélisation des lignes électriques et de la création de modèles urbains. L’étude doit permettre d’évaluer la capacité de la chaîne de traitement à produire les données nécessaires à ces applications.
Géoréférencement direct
Les levers laser aéroporté s’accompagnent parfois de prises de vues aériennes lorsque les spécifications relatives à chaque système le permettent. Partant de ce constat, on peut considérer la réalisation d’orthophotos comme partie intégrante de la chaîne de traitement des données. Cette partie de l’étude consiste à évaluer la pertinence de l’utilisation du géoréférencement direct pour la détermination des données de l’orientation externe nécessaires à la production d’orthophotos. Les problèmes posés par cette technique sont liés au système de coordonnées dans lequel les observations de la centrale inertielle sont mesurées, et à la précision attendue sur les données de l’orientation externe.

3. Expérimentations, recherches
Logiciels de traitement
Les logiciels testés, TerraScan, TerraModeler et Scop++, DTMaster, laissent l’utilisateur plutôt libre dans le choix des étapes du traitement. Un premier travail a donc consisté à valider les étapes de traitement, conseillées lors des formations sur les logiciels, grâce à une analyse globale de chaque chaîne. Cette analyse a permis d’évaluer l’adaptation de chaque logiciel aux besoins du client et aux données sources.
Comparaison de classifications
La principale étape du traitement consiste à effectuer une classification du nuage de points. Cette classification est basée sur des critères géométriques tels que la pente du plan formé par un ensemble de points, la différence d’altitude entre 2 points, et sur d’autres informations telles que le numéro d’écho ou l’intensité. Pour tester la qualité d’une classification, nous avions besoin d’un outil permettant de comparer chaque point du nuage classé à tester avec son homologue dans le nuage classé de référence. L’outil que nous avons choisi est une matrice confusion. Cette matrice permet de visualiser à la fois le nombre de points mal classés et la classe qui leur a été attribuée lors de la classification test et celle qui leur a été
attribuée lors de la classification de référence.
En faisant varier les différents critères de filtrage et en comparant les nuages obtenus
au nuage de référence, nous avons pu obtenir une analyse très fine de l’influence
de ces paramètres et du relief rencontré sur la qualité de la classification.
Durée du traitement
La mesure de la vitesse du traitement automatique sert d’une part à comparer l’efficacité des logiciels et d’autre part à déterminer la taille de bloc de travail optimal. Dans cette partie les dépendances entre vitesse de traitement automatique (2 traitements sont envisagés : sol/sursol et sol/végétation/bâti) et nombre de points et entre vitesse et surface sont mesurées. D’autre part, l’influence du type de terrain (urbain dense, fortes pentes, forêt et forêt + fortes pentes) sur la durée du traitement est aussi quantifiée.
Correction manuelle
Pour chaque type de terrain, un nuage classé de référence a été créé à partir d’une classification automatique agrémentée d’une correction manuelle. La correction manuelle a été chronométrée pour évaluer la part de cette correction dans le processus de traitement. En se basant sur ces corrections manuelles et les matrices de confusions entre nuages testés et nuages de référence, nous avons pu évaluer les gains potentiels en temps de correction manuelle engendrés par la variation des différents paramètres de filtrage.
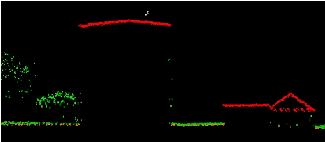
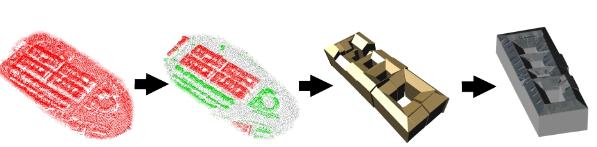
Modèles urbains
Dans le cadre de la réalisation d’un modèle urbain de démonstration sur le centre ville de Nantes (en partenariat avec une société spécialisée en imagerie virtuelle), 3 méthodes de réalisation de modèles urbains ont été testées. Une première méthode, largement automatisée, adaptée aux vues éloignées consiste à plaquer une orthophoto sur un modèle numérique de surface. Une deuxième, réalisée sous TerraScan permet la création de bâtiments différenciés et est adaptée aux vues rapprochées mais est limitée en terme d’automatisation. Enfin, une dernière modélisation, basée sur l’utilisation d’un programme interne d’un partenaire de G2B, a été testée avec un succès relatif. Une amélioration de cette modélisation a été tentée à l’aide d’une édition manuelle du nuage grâce au logiciel de 3D Blender.
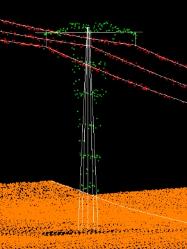
Lignes électriques
Le projet réalisé dans ce domaine nous a permis de dégager les besoins opérationnels nécessaires à la modélisation de lignes électriques. La capacité de TerraScan à permettre une telle modélisation tout en fournissant les données exploitables par le client a été évaluée.
Géoréférencement direct
Les différents systèmes de coordonnées intervenant dans le calcul de géoréférencement direct ont été identifiés, et la formule de détermination des angles de l’orientation externe à partir des angles mesurés par l’INS a été établie. Les variations de cette formule au cours des changements de projet sont expliquées.
La validation de cette méthode de détermination des données de l’orientation externe n’a pas été réalisée faute de disposer des données nécessaires.
4. Résultats
Evaluation des logiciels de traitement
L’analyse de la capacité des 2 logiciels à gérer les types de données en présence ainsi que leur capacité à gérer des blocs de travail a conduit à la conclusion suivante : Scop++ ne permet pas à lui seul de gérer des projets de plus de quelques dizaines de millions de points alors que TerraScan le permet. Cette conclusion est critique car cette nécessité de gestion d’un très grand nombre de points (plusieurs dizaines de millions à quelques milliards) est essentielle. Sur la base des résultats de classification de bâtiments et de l’analyse des modèles numériques de terrain, nous avons établi que la qualité du traitement effectué sous Scop++ était supérieure à celle du traitement effectué sous TerraScan (la classification sous Scop++ est environ 13% plus efficace que celle de TerraScan).
Les tests de productivité ont montré que les traitements automatiques et manuels offerts par TerraScan étaient plus rapides que ceux proposés par Scop++. Néanmoins, la qualité du traitement automatique de Scop++ permet d’augmenter la productivité de la correction manuelle de 30%. Cette première partie suggère que, pour le moment, seul TerraScan est adapté à la chaîne de traitement de G2B, bien que Scop++ apparaisse comme étant le plus performant.
Mise en place d’une chaîne de traitement
La chaîne de traitement des données laser a été établie (pour les 2 logiciels) et l’analyse de l’influence des paramètres de filtrage sur la précision de la classification a permis de rédiger des instructions à l’intention des opérateurs pour qu’ils soient aidés dans le choix des paramètres lorsqu’un nouveau projet doit être traité. Certains paramètres ont une influence non négligeable, un paramètre lié à la classification du bâti par exemple, peut faire gagner jusqu’à 38min et faire perdre jusqu’à 433min de temps de correction manuelle suivant la valeur choisie. La productivité des machines et des opérateurs a été évaluée et il semble, d’après les prix du marché que la distinction bâti/végétation n’est pas assez compétitive. D’autre part un ingénieur a été formé à cette chaîne de traitement.
Applications particulières du laser aéroporté
Les 3 méthodes de modélisation (automatique sous TerraScan, semi-automatique avec le programme automatique du partenaire de G2B et manuelle avec Blender) ont fourni des résultats assez peu satisfaisants sur le plan de la productivité notamment. Ces résultats montrent qu’une densité élevée de points (supérieure à 2pts/m²) doit être disponible pour que les outils de modélisation automatique dont on dispose soient efficaces.
La réalisation d’un modèle urbain de démonstration sur la ville de Nantes n’a pas pu être terminée avec les conditions spécifiées au départ. 3 bâtiments présentent un niveau de réalisme satisfaisant et la dizaine de bâtiments restants a été modélisée à l’aide de prismes.
La modélisation de lignes électriques quant à elle, peut désormais être intégrée dans la chaîne de traitement de G2B, les informations exploitables par le client (position des points d’accrochage, des sommets et des pieds des pylônes) peuvent en effet être facilement exportées grâce à TerraScan.

Géoréférencement direct
La mise en œuvre du calcul de géoréférencement direct a été décrite dans cette étude. On peut retenir que les transformations entre système de projection et système de navigation ainsi qu’entre système de l’avion et système de la caméra sont les plus critiques dans ce calcul car ces transformations sont dépendantes respectivement du système de projection utilisé et du logiciel de photogrammétrie utilisé pour le calcul d’ortho photos. La validation de ce calcul n’a pas pu être faite par manque des données nécessaires.
5. Conclusion
G2B dispose, grâce aux études et expérimentations menées lors de ce Projet de Fin d’Etudes, d’une chaîne de traitement des données laser aéroporté opérationnelle.
Au cours de cette étude, j’ai dégagé des stratégies de traitement en fonction des produits à livrer (MNT, MNS, modèles urbains, modèles de lignes électriques) et des spécifications sur ces produits. Les étapes des différents traitements ont été synthétisées dans un document à l’intention des opérateurs.
Les tests sur la vitesse et la qualité du traitement ainsi que l’adaptation des logiciels testés aux données ont conduit au choix du logiciel de traitement. Les tests sur l’influence des paramètres de classification ont conduit à la détermination des valeurs optimales des paramètres en fonction du relief.
Des instructions ont été rédigées pour permettre aux opérateurs d’adapter le traitement aux reliefs et aux objets rencontrés. La distinction bâti/végétation nécessite une meilleure automatisation pour que G2B puisse être plus compétitif sur ce traitement.
L’étude des applications à valeur ajoutée a montré que la modélisation de bâtiments nécessitait une automatisation plus approfondie pour être compétitive. Quant à la modélisation géométrique de lignes électriques, les expérimentations ont montré que le logiciel de traitement choisi permettait d’extraire à partir du nuage de points la plupart des cotes caractéristiques des câbles et des pylônes
En ce qui concerne le géoréférencement direct, nous avons montré dans quel cas celui-ci pouvait être utilisable et nous avons explicité la formulation mathématique de cette opération. Des tests à venir doivent encore indiquer si cette méthode peut concurrencer le calcul d’aérotriangulation pour la détermination des données de l’orientation externe.