Sébastien Charvet |
REALISATION D’UN PROGRAMME D’ORIENTATION D’UN BLOC DE
PHOTOGRAPHIES POUR LA VISUALISATION ET LA MODELISATION 3D
Société d’accueil : GIPEA
PFE présenté par : Sébastien Charvet
Directeur du PFE : Alexandre Carbonel
Correcteurs : Pierre Grussenmeyer et Tania Landes
1. Contexte de l’étude
Dans le cadre de l’étude de stabilité des fronts rocheux, GIPEA (Géomatique Ingénierie Prévention Environnement Aménagement) a développé une chaîne de traitements photogrammétriques qui leur permet d’offrir une réponse originale pour les études géomécaniques. La mise en place relativement récente de ces traitements n’a pas encore permis d’obtenir les outils optimaux nécessaires à l’étude. Le projet présenté vise donc à fournir un gain en termes de rapidité de traitement, de confort d’utilisation et de moyens nécessaires à la mise en œuvre de l’étude.
Le premier traitement offert par GIPEA au géologue est de permettre la visualisation en trois dimensions d’un front afin d’analyser sa structure globale sans exiger sa présence sur le terrain. La solution offerte est la construction d’anaglyphes à partir de couple stéréoscopiques. Or, les traitements actuels rendent parfois difficile la construction de cet anaglyphe dont la qualité finale n’est pas toujours satisfaisante. Le premier objectif du projet est donc de proposer une application informatique permettant de résoudre ces difficultés.
La finalité de la chaîne de traitements photogrammétriques développée par GIPEA est la construction d’un photomodèle. Pour le réaliser deux données principales sont nécessaires : un modèle 3D et des photographies orientées de la zone à étudier. Le modèle 3D peut être obtenu de différentes manières (tachéométrie, lasergrammétrie, restitution) et ne fait pas l’objet d’études visant à l’optimisation de sa construction. En revanche l’orientation des orientations des photographies reste un aspect contraignant. En effet, l’outil développé et utilisé par GIPEA exige la connaissance de sept points de calage par cliché à orienter. Or la matérialisation et la mesure de points de calage se révèle coûteuse dans des zones aussi difficiles d’accès que des front rocheux. Le second objectif du projet est alors de proposer une solution permettant l’orientation des photographies à partir d’un minimum de points de calage.
2. Construction d’anaglyphes pour la visualisation 3D
a) Choix de la solution
La solution du rééchantillonnage épipolaire a été proposée pour répondre au problème exprimé par GIPEA pour la construction d’anaglyphes. Le principe de ce traitement est de calculer l’homographie plane qui permet de passer de l’image initiale à celle qui aurait été obtenue si les axes des photos avaient été parallèles entre eux et perpendiculaires à la base (cas normal) ; après ce traitement, deux points d’une ligne de l’image de gauche auront leurs homologues dans une même ligne de l’image droite, et la parallaxe transversale est constante. Les lignes épipolaires sont les intersections du faisceau de plans contenant la base et des deux plans image. Dans les images rééchantillonnées, ces droites sont parallèles, alors qu’elles étaient concourantes dans les images initiales.
A l’issue de ce traitement la construction de l’anaglyphe devrait donc se résumer à l’application d’une simple translation horizontale.
b) Traitements effectués
Le calcul de l’homographie sur lequel repose le rééchantillonnage épipolaire nécessite une orientation relative par rotations des clichés préalable. Cette exigence et la suite du traitement sont résolues par les principes décrits ci-dessous :
Orientation relative
Pour ce calcul, la méthode de l’orientation relative par rotation des clichés issue de la condition de coplanéité a été choisie. Celle-ci permet l’introduction de valeurs approchées qui n’est pas nécessaire pour le traitement de couples stéréoscopiques mais qui pourra être réutilisable.
Choix de l’image de référence
Les deux images d’origines ne présentent pas exactement la même orientation par rapport à l’objet à visualiser en 3D. Il convient donc de fixer comme image de référence celle dont l’angle d’incidence de l’axe de prise de vue par rapport à la normale de l’objet est le plus faible. Ce choix repose sur le calcul de la surface couverte par le polygone défini par les points homologues qui devra être la plus grande possible.
Dimensionnement des images de sortie
La transformation des images originales par l’homographie plane va impliquer des déformations de ces clichés. Les dimensions des images rééchantillonnées doivent donc être calculées telles qu’elles englobent la totalité des images transformées afin de limiter la perte d’informations.
Méthode de rééchantillonnage
Lors de l’écriture des fichiers des images rééchantillonnées, la solution de la méthode du plus proche voisin a été adoptée. En effet, celle-ci offre des résultats satisfaisants et sa mise en œuvre est moins lourde qu’une méthode d’un ordre plus important comme l’interpolation bilinéaire.
3. Orientation des photographies et modélisation 3D
a) Fonctionnalités de l’application
Le besoin exprimé par GIPEA était d’éliminer au maximum le nombre de points de calage nécessaires pour l’orientation des photographies et la construction du modèle.
L’orientation relative d’un premier couple d’images permet d’obtenir un premier modèle dans un repère arbitraire. L’orientation relative d’un deuxième couple d’images permet d’obtenir un second modèle dans un repère arbitraire différent du premier. Si il existe trois points en commun entre ces deux modèles, il est alors possible d’appliquer une similitude spatiale à l’un d’eux et ainsi obtenir un modèle global dans un seul repère. De la même manière il est possible de rassembler un nombre important de modèles indépendants dans un repère relatif. Ce traitement peut permettre d’obtenir un modèle d’un objet très étendu sans l’apport d’aucun point de calage. Le semis de points et les orientations étant calculées dans le même repère il est alors possible de construire un photomodèle. A chaque ajout de nouveau modèle, une compensation en bloc par la méthode des faisceaux permettra d’orienter le bloc de photographies de manière plus précise.
La connaissance d’une distance réelle mesurée sur le terrain permet la mise à l’échelle du modèle global. Ceci autorise le géologue à mesurer des distances, des volumes réels ou des angles sur le modèle 3D.
La connaissance d’au moins trois points de calage permet de ramener le modèle complet dans le repère-terrain en lui appliquant une similitude spatiale. Les photographies peuvent alors être plaquées sur des maillages réalisés indépendamment (lasergrammétrie, …) et le géologue dispose alors d’un modèle orienté dans les coordonnées définies pour le chantier.
Cette solution permet alors d’orienter un nombre important de photographies (a priori pas de limites) à partir de seulement trois points de calage. A partir de l’orientation de toutes les photographies, il est alors possible de restituer en trois dimensions afin de construire un modèle 3D ou de plaquer les photographies sur un modèle existant.
b) Conception de l’interface
Suite à l’étude de différents logiciels de photogrammétrie et en fonction des besoins exprimés par les personnes chargée des traitements photogrammétriques au sein de GIPEA, l’interface de l’application créée se présente sous la forme suivante :
La fenêtre principale (figure 1) est divisée en trois zones :
- une zone pour visualiser toutes les images du
projet et y avoir accès facilement,
- une zone centrale pour afficher les photographies
sur lesquelles l’opérateur travaille et peut digitaliser
les points,
- une zone d’affichage de tous les points du modèle
avec leurs coordonnées dans le repère 3D.

Figure 1 : Interface de la nouvelle application
Les données finales à l’issue du processus d’orientation des photographies sont les orientations
externes de chacun des clichés et les coordonnées 3D de tous les
points restitués. Une fenêtre (figure 2) permet de rassembler toutes ces
informations relatives au projet en cours. permet
Elle également d’évaluer la précision de tous les points calculés dans le repère 3D à
l’aide des écarts-types sur chacune des trois coordonnées calculées.
L’application intègre
de visualisation 3D en OpenGL, qui permet de voir la configuration des également une fenêtre
points restitués dans l’espace.
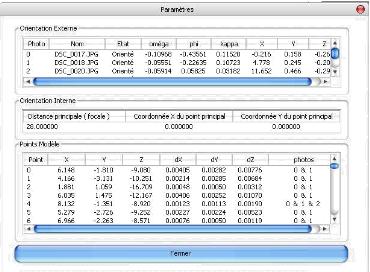
Figure 2 : Paramètres du projet
c) Algorithmes élaborés
La mise en place des calculs nécessaires à l’orientation des images et le calcul des coordonnées des points du modèle a nécessité la conception des traitements suivants :
Orientation Relative
Le premier traitement effectué à l’ajout d’une nouvelle image au projet est son orientation relative avec l’une des images déjà orientée du projet. Le calcul mis en place est l’orientation relative par rotation des clichés issue de la condition de coplanéité, ce calcul est le même que celui utilisé pour le rééchantillonnage épipolaire. Le traitement de photographies qui ne reproduisent pas le cas normal nécessite cependant l’introduction de valeurs initiales. Un système de recherche automatique de ces valeurs initiales a donc été développé.
Similitude spatiale
La similitude spatiale intervient à deux reprises dans le projet. Une première pour rattacher un modèle relatif à un autre afin d’obtenir un modèle global, et une seconde fois pour le recalage du modèle final dans le repère des coordonnées-terrain. Pour ces deux calculs, la connaissance de valeurs approchées pour les sept paramètres de la similitude (trois translations, trois rotations et un facteur d’échelle) est nécessaire. Deux méthodes de recherche de ces valeurs approchées ont donc été développées pour ces deux cas distincts.
Compensation par les faisceaux
L’algorithme central de l’application qui permet de fournir un modèle final de bonne qualité est la compensation en bloc par la méthode des faisceaux. Ce calcul reposant sur une équation d’erreurs linéarisée nécessite également la connaissance de valeurs approchées pour les orientations des images et les coordonnées 3D des points du modèle. La détermination de ces valeurs approchées repose sur les calculs d’orientation relative et de similitude spatiale définis précédemment.
Restitution
La connaissance des orientations externes de tous les clichés permet la restitution de points sur l’objet à représenter. Le calcul des coordonnées 3D de ces points est obtenu à l’aide de l’intersection spatiale.
4. Conclusion
Finalement, la réalisation de ce projet aura permis de fournir à GIPEA des outils intéressants pour l’optimisation de sa chaîne de traitements photogrammétriques. La mise en œuvre d’une application permettant le rééchantillonnage épipolaire d’un couple de photographies permet dorénavant de faciliter la construction des anaglyphes mais également de fournir un résultat de meilleure qualité.
La création d’une application permettant l’orientation de plusieurs images dans un repère relatif sans aucun point de calage fournit un apport significatif. Cet outil permet également l’obtention d’un modèle 3D à l’échelle à partir d’une distance mesurée sur le terrain et du modèle 3D géoréférencé en utilisant uniquement trois points de calages. Les données nécessaires à la construction du photomodèle sont ainsi obtenues plus rapidement et de manière moins contraignante en terme de moyens mis en œuvres.