 Membres
Membres
Les alimentations du capteur sont directement reliées au 5V disponible sur le connecteur de la carte d'alimentation.
Vous trouverez la page Lextronic de ce produit ici.
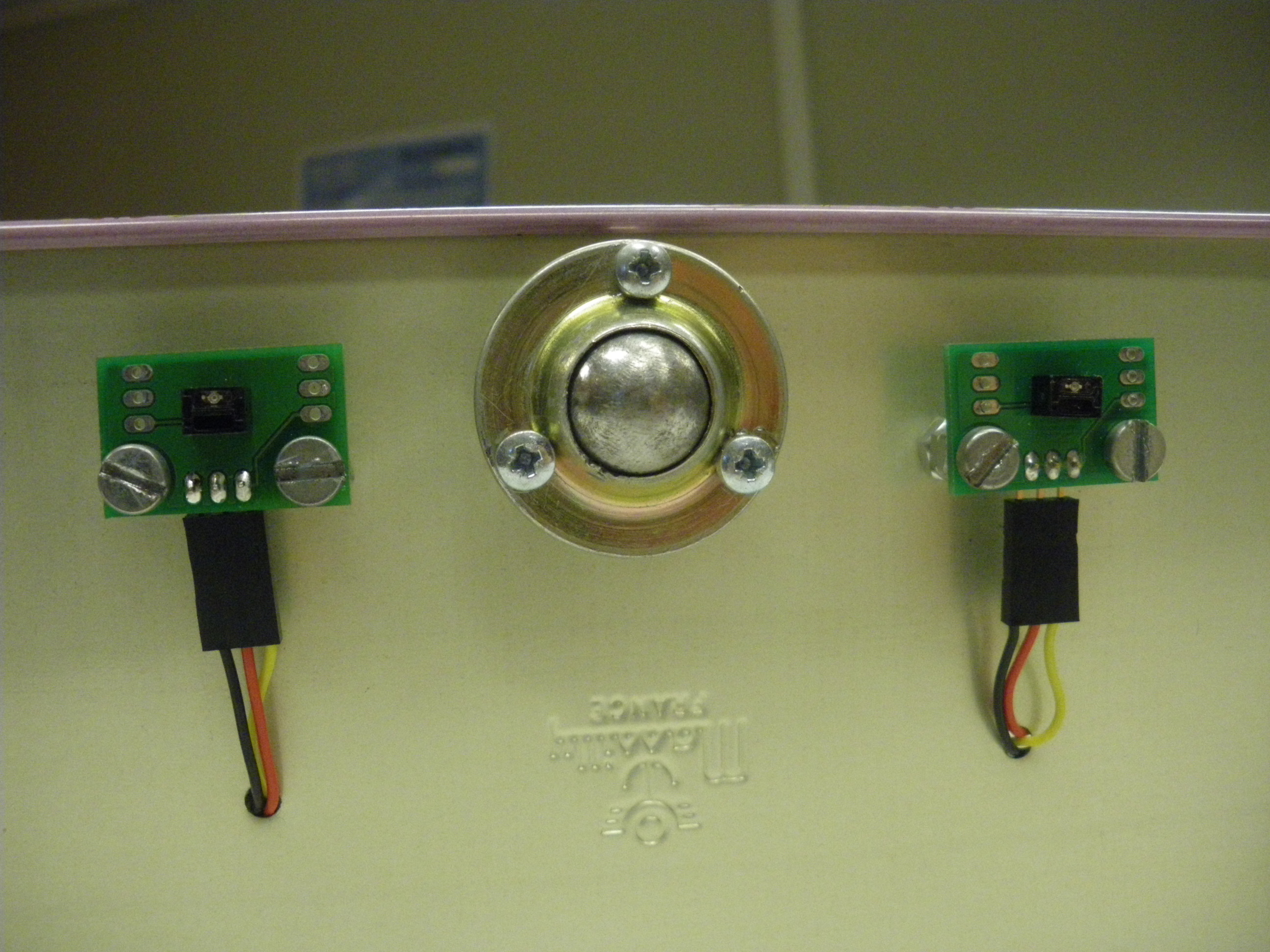
Les sorties capteurs sont interfacées sur le microcontroleur sur les pins PA 21 et PA22.
Le 5V ne pose pas de problčme, le microcontroleur est en effet « 5V tolérant », ce qui signifie qu'il accepte des tensions allant jusqu'ŕ 5V en entrée.
Le module prend son alimentation 3.3V depuis le régulateur de la plaque du microcontroleur. Les signaux Rx et Tx bluetooth sont respectivement connectés aux signaux TxD0 et RxD0 du processeur. Aucun paramčtre n'a été changé dans le module Bluetooth, aussi la communication UART est elle initialisée ŕ 38400 bauds. Le périphérique Bluetooth est ensuite trčs simplement reconnu sous Windows et ajouté en tant que port COM.
Vous trouverez la page Lextronic de ce produit ici.
Pour linux, la procédure s'inspire fortement de cette page.
Ŕ venir : méthode détaillée pour configurer la vitesse de transmission du module bluetooth ŕ 230kbauds.


