James et la WiiMote
Ce tutoriel est créé pour Linux, si vous voulez nous faire parvenir une version pour Windows, n'hésitez pas.
I. Connexion ŕ la télécommande : WiiMote
Il est possible de récupérer les informations de la télécommande de la Wii. Nous allons voir ici comment piloter notre petit robot grâce ŕ cette télécommande.
Installer la librairie « libcwiimote » : http://libwiimote.sourceforge.net/
Sur ubuntu : dans Synaptic, rechercher wii, installer les paquets.
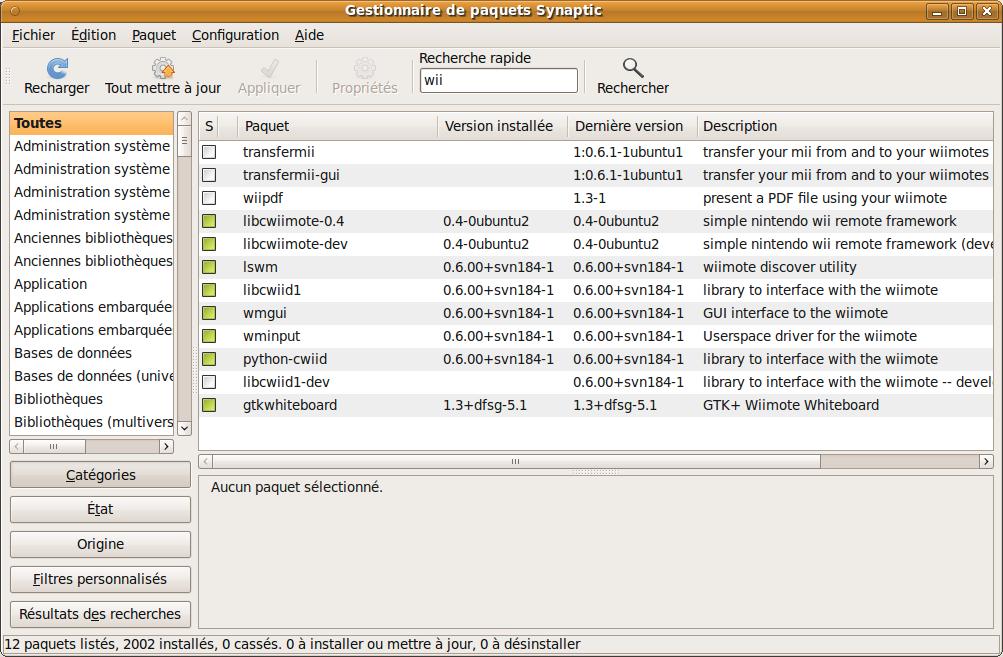 Illustration 1: Synaptic, installation des paquets concernant la Wii
Illustration 1: Synaptic, installation des paquets concernant la Wii
Il est alors trčs facile de s'essayer ŕ la récupération des informations de la wii en s'inspirant du code d'exemple fournit sur le site précédemment cité.
// print wiimote accelerometer data to stdout.
// replace xx:xx:xx:xx:xx:xx with the correct bluetooth address.
#include
#include "wiimote_api.h"
int main()
{
wiimote_t wi;
wiimote_connect(&wi, "xx:xx:xx:xx:xx");
wi.mode.acc = 1; // enable accelerometer
while (wiimote_is_open(&wi)) {
wiimote_update(&wi); // synchronize with wiimote
if (wi.keys.home) { // check if home key is pressed
wiimote_disconnect(&wi);
}
printf("x=%d y=%d z=%d\n", wi.axis.x, wi.axis.y, wi.axis.z);
}
Il est ici demandé l'adresse mac de la wiimote. On peut aisément la connaître grace ŕ la commande :
Pour nous : 00:1F:C5:5C:50:3B
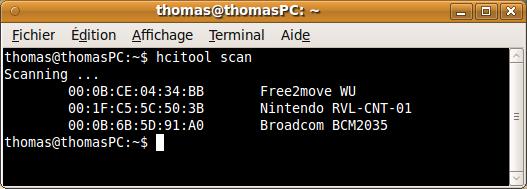 Illustration 2: hcitool scan : liste des périphériques bluetooth
Illustration 2: hcitool scan : liste des périphériques bluetooth
II. Connexion au module free2move
On a pu relever l'adresse mac de notre module bluetooth <-> uart grâce ŕ la commande précédente. (00:0B:CE:04:34:BB)
Voici un petit script, qu'il est intéressant de placer dans /usr/bin/ afin de pouvoir l'exécuter depuis n'importe oů dans la console.
 Illustration 3: Edition du script de connexion bluetooth
Illustration 3: Edition du script de connexion bluetooth
Le script est le suivant : il faut remplacer l'adresse mac 00:0B:CE:02:40:B6 par la votre.
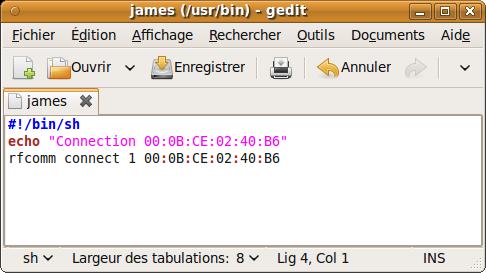 Illustration 4: Edition du script de connexion bluetooth 2
Illustration 4: Edition du script de connexion bluetooth 2
L'exécution du script permet alors de créer un port Com « rfcomm1 » attaché au module free2move.
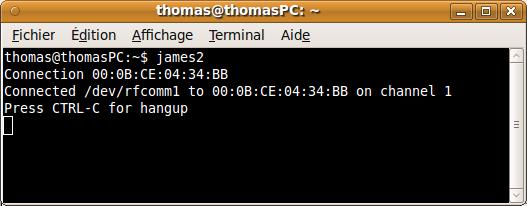 Illustration 5: Connexion au module Free2Move
Illustration 5: Connexion au module Free2Move
III. Le programme
1. Utilisation du port Com :
On utilisera les fichiers « serie.h » et « serie.c » et notamment les fonctions suivantes :
/**
* jamesWriteString : Send a string throught the serial port.
* @param parPtrString : string to be sent.
* @return wn : number of byte written.
*/
int jamesWriteString( char * parPtrString);
/**
* jamesWriteString : Send a cmd
* @param parCmd : byte array
* @param parLength : longueur
* @return wn : number of byte written.
*/
int jamesWriteCmd(unsigned char * parCmd, int parLength);
/**
* jamesOpenPort : open the serial port describe by james_SERIAL_PORT
* @param none
* @return mFd : -1 if fail to open.
*/
int jamesOpenPort(void);
/**
* jamesRead : poll the serial port
* @param parPtr : name of the thread, could be everything.
* @return should never return...
*/
void * jamesRead(void * parPtr);
- La premičre « jamesWriteString » est utilisée pour écrire des données au format texte.
- La seconde « jamesWriteCmd » envois une commande pas forcément texte : il faut préciser le nombre de caractčres ŕ envoyer.
- La troisiemme « jamesOpenPort » permet d'initialiser la communication série.
- La derniere « jamesRead » doit etre lancée comme thread et ne se termine jamais.
/* Crée les thread */
if( pthread_create( &wThSerie, NULL, jamesRead, (void*)"James serial" ) < 0 )
{
printf("Fail to create Thread : James serial \n");
exit(-1);
}
[...]
/*Rejoint les threads */
(void)pthread_join( wThSerie, &wThreadRet );
2. Programme global
Pour ce qui est du reste, voici globalement comment fonctionne le programme, libre ŕ vous de creuser un peu le code.
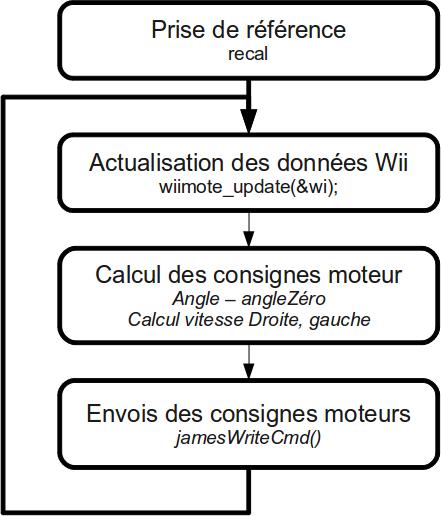 Illustration 6: Algorithme global
Illustration 6: Algorithme global
IV. Exécution du programme
Il faut d'abord lancer la connexion serie bluetooth
puis se placer dans le répertoire contenant l'executable de notre programme, (ou l'appeler avec le bon chemin) et l'executer.
Voici un aperçu de chez nous :
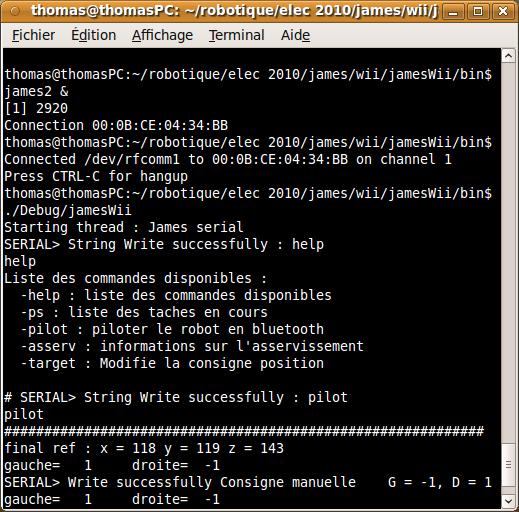 Illustration 7: Résultat
Illustration 7: Résultat
Vous pouvez trouver le fichier .pdf de cette présentation sur ce lien ainsi qu'un dossier .zip contenant des éléments de code.
 Membres
Membres

