Bienvenue sur le site du Club Robotique de l'INSA de Strasbourg !
Coupe de France 2019 : la dernière ligne droite
Cette année encore, le CRIS participe à la coupe de France à la Roche-sur-Yon (Vendée), du 29 mai au 1 juin 2019.
Le thème de cette année, "Atom Factory" oblige nos robot à interagir avec des atomes, représentés par des palets de hockey sur glace, de masses et couleurs différentes. Il s'agit de les récupérer à divers emplacements du plateau (sur la piste, sur des distributeur), les trier et les déposer de façon à faire un nombre de points maximal.
Le robot principal
Une première équipe réalise la partie mécanique du robot principal. Ce dernier est composé de 6 actionneurs identiques permettant la préhension de 2 fois 3 palets, à l'aide d'un système pneumatique. Un dernier actionneur, dédié à la libération puis préhension du goldenium (atome unique rapportant un nombre de points plus conséquent que les autres) a également été modélisé.
Une seconde équipe s'occupe de la réalisation des cartes électroniques permettant de piloter le robot et de contrôler les actionneurs : - une carte principale, communicant avec la Raspberry Pi 3 - deux cartes actionneurs, commincant avec la carte principale. Elles permettent la commande des actionneurs (partie puissance) ainsi que le traitement des données des capteurs de couleurs - une carte LIDAR,communicant avec la carte principale. Elle sert d'interface avec le module LIDAR. Ce dernier sert à détecter les adversaires pour adapter notre stratégie. - une carte écran, communicant avec la carte principale. La carte écran permet la communication avec un écran tactile, utile pour le déboggage du robot, pour des retours de capteurs, codeurs, etc... ainsi que pour l'affichage du score.
Un dernière équipe s'occupe de la programmation des différentes cartes : - dSPIC de la carte principale - Raspberry Pi et algorithme de pathfinding (recherche du chemin optimal) - ATMega des cartes actionneurs
Nos autres conceptions
Deux de nos membres se penchent également sur la vision, à l'aide d'une caméra pour Raspberry Pi et d'OpenCV. A terme, nous espérons intégrer cette technologie à nos robot.
Une équipe de premières années (STH1), arrivés cette année à l'INSA et au club, s'occupe de la réalisation de l'expérience. Il s'agit d'un élément, placé sur le bord de la piste, qui doit être déclanché après le début du match et qui est très libre dans son fonctionnement (réalisation d'un mouvement, de lumière, de bruit, etc...).
La dernière équipe planche sur la réalisation de l'électron. C'est un petit élément de 600 grammes maximum, se déplaçant le long d'un fil depuis notre expérience vers le mat central. A la fin du match, il doit être à moins de 5cm du mat pour nous faire gagner des points.
Dans les prochaines semaines, nous allons présenter plus en détail nos différentes réalisations !
Une nouvelle fin d'année !
La coupe de France de robotique
La coupe de robotique, organisée par Planète Sciences, se déroula du 24 au 28 mai à La Roche-Sur-Yon, et nous avons bien pu y participer.
Malgré un travail ininterrompu durant toute la semaine de compétition, de nombreux problèmes techniques ne nous ont permis d'homologuer nos deux robots que le vendredi soir, ne nous laissant qu'un match pour tenter de remonter au classement.
Évidemment, à cause du peu de temps restant pour peaufiner notre stratégie, ce dernier n'est donc pas au rendez-vous et ne nous permet de nous hisser qu'à la 108 place sur environ 180 équipes.
Néanmoins, la qualité de nos robots était, elle, bien présente. Les événements ont fait qu'il ne nous a manqué que quelques jours de tests avant la compétition afin de finaliser nos robots et donc résoudre tous les problèmes que nous avons croisés sur place. Cette coupe restera tout de même, comme chaque année, un moment privilégié, rempli de robotique, de bonne ambiance et de découvertes tant humaines que technologiques !
Nous tenons une fois de plus à remercier tous nos partenaires, Arts et Industries, Institut national des sciences appliquées de Strasbourg, la Plateforme Mécanique, Igus, HPC, Micro-Modele / Le Train Magique, RFConception et IREPA LASER, pour nous permettre de participer à cet événement plus qu'enrichissant chaque année !
AG de fin d'année
Jeudi dernier s'est déroulée la dernière AG de l'année et un nouveau bureau a donc été élu. Je suis donc heureux de vous présenter la prochaine équipe à reprendre le flambeau :
- Johan conserve son poste de président
- Florian pour le poste de vice-président
- John trésorier
- Et Justine conserve son poste de secrétaire !
Bonne chance à eux !
Gl hf !
Toujours au boulot !
Et oui, cela fait un petit moment que nous ne vous avons pas fait une petite news mais ça ne veut pas dire que le club est au repos, au contraire !
La coupe de France de robotique
Plus que neufs semaines avant l'échéance de notre plus gros projet, la coupe de France qui se déroulera du 24 au 28 mai.
L'électronique de nos deux robots sont terminées et approuvées, et la programmation des différents micro-contrôleurs est presque terminée ! Il ne nous reste plus qu'à finir le programme principal sur notre Raspberry Pi et tout tester !
Le développement de nos toutes nouvelles balises (permettant de déterminer la position des robots adverses) avance également à grand pas et nous espérons pouvoir les mettre à l'épreuve très bientôt !
Du côté mécanique, de petits imprévus au niveau de la découpe de nos tôles nous ont bien retardés. Mais toute nos commandes sont lancées et nous sommes prêts à mettre les bouchées doubles à leur réception afin de réaliser de beaux robots !
Vous l'aurez compris, nos robots rouleront à temps !
Vous l'aurez compris, vous n'avez pas encore fini d'entendre parler de nous cette année !
Une année 2017 prometteuse !
Les James
Comme vous vous en doutez, après des semaines de préparation, les quatre équipes formées de nos jeunes roboticiens ont enfin donné naissance à leur bien-aimé James. Même si tous n'ont pas su trouver la ligne, ils s'en sont tous très bien sortis ! Ce projet a donc permis à chacun d’approfondir un domaine qui leur tenait à cœur, tout en s’amusant !

Malheureusement, il ne peut y avoir qu'un seul gagnant. Et le grand vainqueur de notre mini compétition est le fameux Robone ! Vous pouvez en juger par vous-même en regardant un extrait de sa performance.
Carte du gros robot
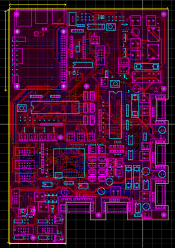
La carte du gros robot a, elle aussi, bien grandi depuis la rentrée. En effet après 2 mois de travail pour les schémas et 2 semaines et demi de routage celle-ci a enfin vu le jour !
La carte a été réalisée à la plateforme mécanique de l'INSA de Strasbourg, par gravure anglaise, par notre bien-aimé Cédric, encore merci à lui !

La suite n’en a pas été plus rapide, en effet il y a eu 1 mois de soudage et de débogage pour arriver au résultat ci-dessous.


Cette carte se compose de 3 microcontrôleurs PIC, un ATXmega256A3u, une carte RPI (non connectée sur les photos), ainsi que de 465 vias soudés à la main ! Toute l'IHM présente sur la carte se trouve sur le dessus (photo de droite) afin de pouvoir facilement régler, programmer et déboguer la carte. Les connecteurs se trouvent quant à eux sur le "solder side" de la carte (à gauche). Ceci nous permettra de connecter facilement tous les éléments venant de l'intérieur de notre robot !
Mais il reste du travail. Il faut encore programmer la plupart des éléments de cette belle carte. Néanmoins, la gestion de la puissance et la programmation de la communication entre les microcontrôleurs sont bientôt terminées! Tout ceci est de bonne augure pour la réalisation de notre robot !
Bien qu'elle soit belle, cette carte est une « carte de tests polyvalente», i.e nous pourrons la réutiliser chaque année. Nous pourrons ainsi, pour les années à venir, l’améliorer et/ou la modifier afin qu’elle devienne plus performante et qu'elle réponde plus justement à nos besoins !
Nous continuons sur ces belles paroles en vous souhaitant à tous et à toutes une belle année 2017, avec de la joie, de l’amour, une bonne santé et surtout de la robotique à en revendre !
La Rentrée du Club
Bonjour à tous !
Une énième année a débuté au club de robotique et de nombreux arrivants intéressés et motivés nous ont déjà rejoints.

Afin de bien débuter l'année, nous avons souhaité remettre au goût du jour une méthode d'apprentissage intéressante et efficace afin d’initier les nouveaux à la mécanique, à l’électronique et à la programmation de nos robots : Les « James ».
En quoi consiste cette méthode ?
Plusieurs équipes ont été formées pour créer ces petits robots et participer à une compétition. Cette dernière relie les trois disciplines et permet d’acquérir toutes les bases nécessaires afin de travailler sur les robots participants aux différentes coupes à venir. Elle se déroulera sous forme d'une course sur une piste réalisée par nos soins. Le premier des deux robots atteignant l'autre remportera des points supplémentaires. La réponse au cahier des charges ainsi que la customisation du véhicule aurons également une importance dans le classement final.

Ce projet va donc permettre aux étudiants de répondre au cahier des charges spécifique lié aux « James »: Allumage de LED, arrêt lors d'un choc avant ou arrière, suivi d'une ligne noire, customisation de la base mécanique.
L'initiation à l’électronique a apporté la connaissance du fonctionnement des composants utilisés, leur assemblage ainsi que la programmation en C du microcontrôleur associé, un PIC18F2520. A la fin de l'apprentissage chacun d'entre eux était capable d'allumer et éteindre une LED correctement sur un montage préalablement étudié et branché.
La mécanique commença sa formation par un tutoriel du logiciel de modélisation 3D, CREO, la fabrication d'une pièce et enfin de comprendre l'architecture du robot demandé. La mécanique du "James" est composée d'une tôle d'alu percée sur laquelle nous visserons des blocs imprimés comme le pare-choc ou les supports batterie et moteur par exemple. Chaque membre a donc pu donc se familiariser avec les possibilités du logiciel.
Nous attendons avec impatience ce que vont nous proposé les équipes en lice !
Événements à venir
Comme chaque année le club participera également à la manifestation "La fête de la Science" au Vaisseau de Strasbourg le 14 Octobre (pour les collèges et lycées) et le 15 et 16 Octobre pour le grand public.

C'est l’occasion pour nous de faire découvrir l'univers de la robotique et pour vous de venir voir nos dernières créations lors d’une reconstitution de la coupe de France avec d'autres équipes !
On vous attend nombreux !